test of nonlinear inequality constraints on scalar bounds More...
#include <tests/simulated2DConstraints.h>#include <gtsam/inference/Symbol.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <CppUnitLite/TestHarness.h>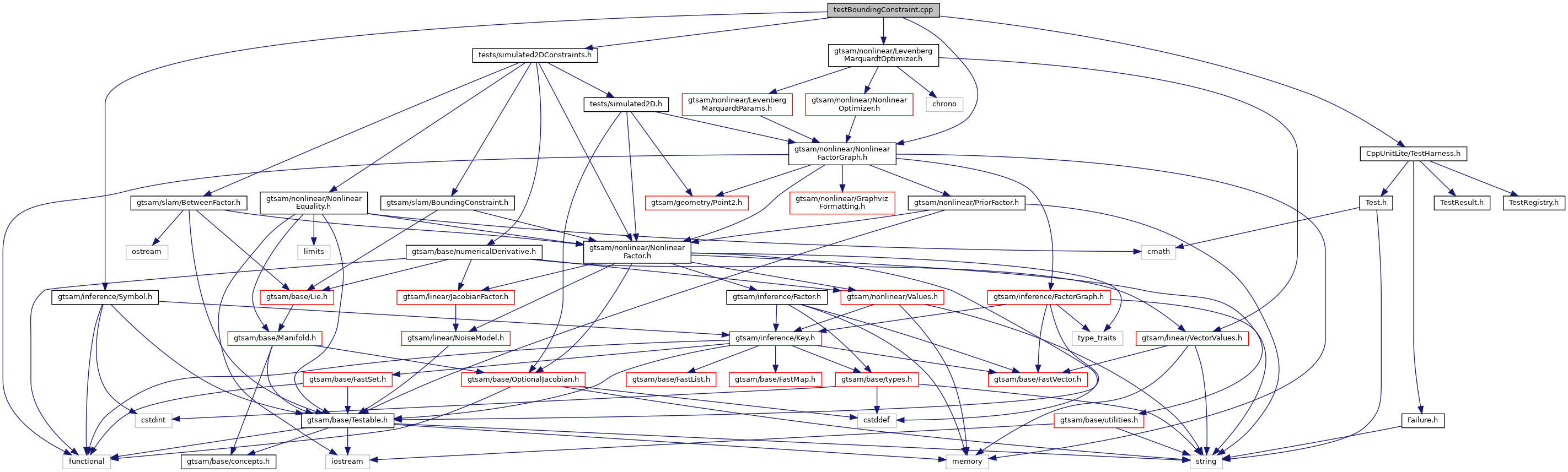
Go to the source code of this file.
Functions | |
| int | main () |
| TEST (testBoundingConstraint, avoid_demo) | |
| TEST (testBoundingConstraint, MaxDistance_basics) | |
| TEST (testBoundingConstraint, MaxDistance_simple_optimization) | |
| TEST (testBoundingConstraint, unary_basics_active1) | |
| TEST (testBoundingConstraint, unary_basics_active2) | |
| TEST (testBoundingConstraint, unary_basics_inactive1) | |
| TEST (testBoundingConstraint, unary_basics_inactive2) | |
| TEST (testBoundingConstraint, unary_linearization_active) | |
| TEST (testBoundingConstraint, unary_linearization_inactive) | |
| TEST (testBoundingConstraint, unary_simple_optimization1) | |
| TEST (testBoundingConstraint, unary_simple_optimization2) | |
Variables | |
| iq2D::PoseXInequality | constraint1 (key, 1.0, true, mu) |
| iq2D::PoseYInequality | constraint2 (key, 2.0, true, mu) |
| iq2D::PoseXInequality | constraint3 (key, 1.0, false, mu) |
| iq2D::PoseYInequality | constraint4 (key, 2.0, false, mu) |
| SharedDiagonal | hard_model1 = noiseModel::Constrained::All(1) |
| gtsam::Key | key = 1 |
| double | mu = 10.0 |
| SharedDiagonal | soft_model2 = noiseModel::Unit::Create(2) |
| SharedDiagonal | soft_model2_alt = noiseModel::Isotropic::Sigma(2, 0.1) |
| static const double | tol = 1e-5 |
Detailed Description
test of nonlinear inequality constraints on scalar bounds
Definition in file testBoundingConstraint.cpp.
Function Documentation
◆ main()
| int main | ( | ) |
Definition at line 274 of file testBoundingConstraint.cpp.
◆ TEST() [1/11]
| TEST | ( | testBoundingConstraint | , |
| avoid_demo | |||
| ) |
Definition at line 245 of file testBoundingConstraint.cpp.
◆ TEST() [2/11]
| TEST | ( | testBoundingConstraint | , |
| MaxDistance_basics | |||
| ) |
Definition at line 182 of file testBoundingConstraint.cpp.
◆ TEST() [3/11]
| TEST | ( | testBoundingConstraint | , |
| MaxDistance_simple_optimization | |||
| ) |
Definition at line 221 of file testBoundingConstraint.cpp.
◆ TEST() [4/11]
| TEST | ( | testBoundingConstraint | , |
| unary_basics_active1 | |||
| ) |
Definition at line 85 of file testBoundingConstraint.cpp.
◆ TEST() [5/11]
| TEST | ( | testBoundingConstraint | , |
| unary_basics_active2 | |||
| ) |
Definition at line 100 of file testBoundingConstraint.cpp.
◆ TEST() [6/11]
| TEST | ( | testBoundingConstraint | , |
| unary_basics_inactive1 | |||
| ) |
Definition at line 47 of file testBoundingConstraint.cpp.
◆ TEST() [7/11]
| TEST | ( | testBoundingConstraint | , |
| unary_basics_inactive2 | |||
| ) |
Definition at line 66 of file testBoundingConstraint.cpp.
◆ TEST() [8/11]
| TEST | ( | testBoundingConstraint | , |
| unary_linearization_active | |||
| ) |
Definition at line 126 of file testBoundingConstraint.cpp.
◆ TEST() [9/11]
| TEST | ( | testBoundingConstraint | , |
| unary_linearization_inactive | |||
| ) |
Definition at line 115 of file testBoundingConstraint.cpp.
◆ TEST() [10/11]
| TEST | ( | testBoundingConstraint | , |
| unary_simple_optimization1 | |||
| ) |
Definition at line 139 of file testBoundingConstraint.cpp.
◆ TEST() [11/11]
| TEST | ( | testBoundingConstraint | , |
| unary_simple_optimization2 | |||
| ) |
Definition at line 161 of file testBoundingConstraint.cpp.
Variable Documentation
◆ constraint1
| iq2D::PoseXInequality constraint1(key, 1.0, true, mu) |
◆ constraint2
| iq2D::PoseYInequality constraint2(key, 2.0, true, mu) |
◆ constraint3
| iq2D::PoseXInequality constraint3(key, 1.0, false, mu) |
◆ constraint4
| iq2D::PoseYInequality constraint4(key, 2.0, false, mu) |
◆ hard_model1
| SharedDiagonal hard_model1 = noiseModel::Constrained::All(1) |
Definition at line 33 of file testBoundingConstraint.cpp.
◆ key
| gtsam::Key key = 1 |
Definition at line 36 of file testBoundingConstraint.cpp.
◆ mu
| double mu = 10.0 |
Definition at line 37 of file testBoundingConstraint.cpp.
◆ soft_model2
| SharedDiagonal soft_model2 = noiseModel::Unit::Create(2) |
Definition at line 31 of file testBoundingConstraint.cpp.
◆ soft_model2_alt
| SharedDiagonal soft_model2_alt = noiseModel::Isotropic::Sigma(2, 0.1) |
Definition at line 32 of file testBoundingConstraint.cpp.
◆ tol
|
static |
Definition at line 29 of file testBoundingConstraint.cpp.