#include <NoiseModel.h>
Public Types | |
| typedef std::shared_ptr< Isotropic > | shared_ptr |
 Public Types inherited from gtsam::noiseModel::Diagonal Public Types inherited from gtsam::noiseModel::Diagonal | |
| typedef std::shared_ptr< Diagonal > | shared_ptr |
| Public Types inherited from gtsam::noiseModel::Gaussian | |
| typedef std::shared_ptr< Gaussian > | shared_ptr |
| Public Types inherited from gtsam::noiseModel::Base | |
| typedef std::shared_ptr< Base > | shared_ptr |
Public Member Functions | |
| Isotropic () | |
| void | print (const std::string &name) const override |
| double | sigma () const |
| double | squaredMahalanobisDistance (const Vector &v) const override |
| Squared Mahalanobis distance v'*R'*R*v = <R*v,R*v> More... | |
| Vector | unwhiten (const Vector &v) const override |
| Unwhiten an error vector. More... | |
| Matrix | Whiten (const Matrix &H) const override |
| Vector | whiten (const Vector &v) const override |
| Whiten an error vector. More... | |
| void | WhitenInPlace (Eigen::Block< Matrix > H) const override |
| void | WhitenInPlace (Matrix &H) const override |
| void | whitenInPlace (Vector &v) const override |
| ~Isotropic () override | |
| Public Member Functions inherited from gtsam::noiseModel::Diagonal | |
| Diagonal () | |
| double | invsigma (size_t i) const |
| const Vector & | invsigmas () const |
| double | precision (size_t i) const |
| const Vector & | precisions () const |
| Matrix | R () const override |
| double | sigma (size_t i) const |
| Vector | sigmas () const override |
| Calculate standard deviations. More... | |
| ~Diagonal () override | |
| Public Member Functions inherited from gtsam::noiseModel::Gaussian | |
| virtual Matrix | covariance () const |
| Compute covariance matrix. More... | |
| bool | equals (const Base &expected, double tol=1e-9) const override |
| Gaussian (size_t dim=1, const std::optional< Matrix > &sqrt_information={}) | |
| virtual Matrix | information () const |
| Compute information matrix. More... | |
| double | logDeterminant () const |
| Compute the log of |Σ|. More... | |
| double | negLogConstant () const |
| Compute the negative log of the normalization constant for a Gaussian noise model k = 1/\sqrt(|2πΣ|). More... | |
| virtual std::shared_ptr< Diagonal > | QR (Matrix &Ab) const |
| void | WhitenSystem (Matrix &A, Vector &b) const override |
| void | WhitenSystem (Matrix &A1, Matrix &A2, Matrix &A3, Vector &b) const override |
| void | WhitenSystem (Matrix &A1, Matrix &A2, Vector &b) const override |
| void | WhitenSystem (std::vector< Matrix > &A, Vector &b) const override |
| ~Gaussian () override | |
| Public Member Functions inherited from gtsam::noiseModel::Base | |
| Base (size_t dim=1) | |
| primary constructor More... | |
| size_t | dim () const |
| Dimensionality. More... | |
| virtual bool | isConstrained () const |
| true if a constrained noise model, saves slow/clumsy dynamic casting More... | |
| virtual bool | isUnit () const |
| true if a unit noise model, saves slow/clumsy dynamic casting More... | |
| virtual double | loss (const double squared_distance) const |
| loss function, input is Mahalanobis distance More... | |
| virtual double | mahalanobisDistance (const Vector &v) const |
| Mahalanobis distance. More... | |
| virtual Vector | unweightedWhiten (const Vector &v) const |
| virtual void | unwhitenInPlace (Eigen::Block< Vector > &v) const |
| virtual void | unwhitenInPlace (Vector &v) const |
| virtual double | weight (const Vector &v) const |
| virtual void | whitenInPlace (Eigen::Block< Vector > &v) const |
| virtual | ~Base () |
Static Public Member Functions | |
| static shared_ptr | Precision (size_t dim, double precision, bool smart=true) |
| static shared_ptr | Sigma (size_t dim, double sigma, bool smart=true) |
| static shared_ptr | Variance (size_t dim, double variance, bool smart=true) |
| Static Public Member Functions inherited from gtsam::noiseModel::Diagonal | |
| static shared_ptr | Precisions (const Vector &precisions, bool smart=true) |
| static shared_ptr | Sigmas (const Vector &sigmas, bool smart=true) |
| static shared_ptr | Variances (const Vector &variances, bool smart=true) |
| Static Public Member Functions inherited from gtsam::noiseModel::Gaussian | |
| static shared_ptr | Covariance (const Matrix &covariance, bool smart=true) |
| static shared_ptr | Information (const Matrix &M, bool smart=true) |
| static shared_ptr | SqrtInformation (const Matrix &R, bool smart=true) |
Protected Member Functions | |
| Isotropic (size_t dim, double sigma) | |
| virtual double | logDetR () const override |
| Compute the log of |R|. Used for computing log(|Σ|) More... | |
| Protected Member Functions inherited from gtsam::noiseModel::Diagonal | |
| Diagonal (const Vector &sigmas) | |
Protected Attributes | |
| double | invsigma_ |
| double | sigma_ |
| Protected Attributes inherited from gtsam::noiseModel::Diagonal | |
| Vector | invsigmas_ |
| Vector | precisions_ |
| Vector | sigmas_ |
| Protected Attributes inherited from gtsam::noiseModel::Gaussian | |
| std::optional< Matrix > | sqrt_information_ |
| Protected Attributes inherited from gtsam::noiseModel::Base | |
| size_t | dim_ |
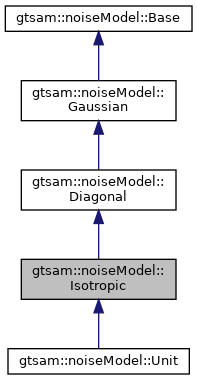
Detailed Description
An isotropic noise model corresponds to a scaled diagonal covariance To construct, use one of the static methods
Definition at line 541 of file NoiseModel.h.
Member Typedef Documentation
◆ shared_ptr
| typedef std::shared_ptr<Isotropic> gtsam::noiseModel::Isotropic::shared_ptr |
Definition at line 559 of file NoiseModel.h.
Constructor & Destructor Documentation
◆ Isotropic() [1/2]
|
inlineprotected |
protected constructor takes sigma
Definition at line 546 of file NoiseModel.h.
◆ Isotropic() [2/2]
|
inline |
Definition at line 555 of file NoiseModel.h.
◆ ~Isotropic()
|
inlineoverride |
Definition at line 557 of file NoiseModel.h.
Member Function Documentation
◆ logDetR()
|
overrideprotectedvirtual |
Compute the log of |R|. Used for computing log(|Σ|)
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 676 of file NoiseModel.cpp.
◆ Precision()
|
inlinestatic |
An isotropic noise model created by specifying a precision
Definition at line 577 of file NoiseModel.h.
◆ print()
|
overridevirtual |
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 636 of file NoiseModel.cpp.
◆ sigma()
|
inline |
Return standard deviation
Definition at line 593 of file NoiseModel.h.
◆ Sigma()
|
static |
An isotropic noise model created by specifying a standard devation sigma
Definition at line 624 of file NoiseModel.cpp.
◆ squaredMahalanobisDistance()
|
overridevirtual |
Squared Mahalanobis distance v'*R'*R*v = <R*v,R*v>
Reimplemented from gtsam::noiseModel::Base.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 641 of file NoiseModel.cpp.
◆ unwhiten()
Unwhiten an error vector.
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 651 of file NoiseModel.cpp.
◆ Variance()
|
static |
An isotropic noise model created by specifying a variance = sigma^2.
- Parameters
-
dim The dimension of this noise model variance The variance of this noise model smart check if can be simplified to derived class
Definition at line 630 of file NoiseModel.cpp.
◆ Whiten()
Multiply a derivative with R (derivative of whiten) Equivalent to whitening each column of the input matrix.
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 656 of file NoiseModel.cpp.
◆ whiten()
Whiten an error vector.
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 646 of file NoiseModel.cpp.
◆ WhitenInPlace() [1/2]
|
overridevirtual |
In-place version
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 671 of file NoiseModel.cpp.
◆ WhitenInPlace() [2/2]
|
overridevirtual |
In-place version
Reimplemented from gtsam::noiseModel::Diagonal.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 661 of file NoiseModel.cpp.
◆ whitenInPlace()
|
overridevirtual |
in-place whiten, override if can be done more efficiently
Reimplemented from gtsam::noiseModel::Base.
Reimplemented in gtsam::noiseModel::Unit.
Definition at line 666 of file NoiseModel.cpp.
Member Data Documentation
◆ invsigma_
|
protected |
Definition at line 543 of file NoiseModel.h.
◆ sigma_
|
protected |
Definition at line 543 of file NoiseModel.h.
The documentation for this class was generated from the following files: