#include <TriangulationFactor.h>
Public Types | |
| using | Camera = CAMERA |
| CAMERA type. More... | |
| using | Measurement = typename CAMERA::Measurement |
| shorthand for measurement type, e.g. Point2 or StereoPoint2 More... | |
| using | shared_ptr = std::shared_ptr< This > |
| shorthand for a smart pointer to a factor More... | |
 Public Types inherited from gtsam::NoiseModelFactorN< Point3 > Public Types inherited from gtsam::NoiseModelFactorN< Point3 > | |
| enum | |
| N is the number of variables (N-way factor) More... | |
| using | ValueType = typename std::tuple_element< I - 1, std::tuple< ValueTypes... > >::type |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
Public Member Functions | |
| gtsam::NonlinearFactor::shared_ptr | clone () const override |
| bool | equals (const NonlinearFactor &p, double tol=1e-9) const override |
| equals More... | |
| Vector | evaluateError (const Point3 &point, OptionalMatrixType H2) const override |
| Evaluate error h(x)-z and optionally derivatives. More... | |
| std::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| const Measurement & | measured () const |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| bool | throwCheirality () const |
| TriangulationFactor () | |
| Default constructor. More... | |
| TriangulationFactor (const CAMERA &camera, const Measurement &measured, const SharedNoiseModel &model, Key pointKey, bool throwCheirality=false, bool verboseCheirality=false) | |
| bool | verboseCheirality () const |
| ~TriangulationFactor () override | |
| Public Member Functions inherited from gtsam::NoiseModelFactorN< Point3 > | |
| Key | key () const |
| virtual Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const =0 |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| ~NoiseModelFactorN () override | |
| NoiseModelFactorN () | |
| Default Constructor for I/O. More... | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, KeyType< ValueTypes >... keys) | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, CONTAINER keys) | |
| Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const override |
| virtual Vector | evaluateError (const ValueTypes &... x, OptionalMatrixTypeT< ValueTypes >... H) const=0 |
| Vector | evaluateError (const ValueTypes &... x, MatrixTypeT< ValueTypes > &... H) const |
| Vector | evaluateError (const ValueTypes &... x) const |
| AreAllMatrixRefs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| AreAllMatrixPtrs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| Key | key1 () const |
| Key | key2 () const |
| Key | key3 () const |
| Key | key4 () const |
| Key | key5 () const |
| Key | key6 () const |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| size_t | dim () const override |
| double | error (const Values &c) const override |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model More... | |
| NoiseModelFactor () | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| Vector | unweightedWhitenedError (const Values &c) const |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| double | weight (const Values &c) const |
| Vector | whitenedError (const Values &c) const |
| ~NoiseModelFactor () override | |
| Public Member Functions inherited from gtsam::NonlinearFactor | |
| NonlinearFactor () | |
| template<typename CONTAINER > | |
| NonlinearFactor (const CONTAINER &keys) | |
| double | error (const HybridValues &c) const override |
| virtual bool | active (const Values &) const |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| virtual bool | sendable () const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Public Attributes | |
| Matrix | A |
| VerticalBlockMatrix | Ab |
| thread-safe (?) scratch memory for linearize More... | |
| Vector | b |
Protected Types | |
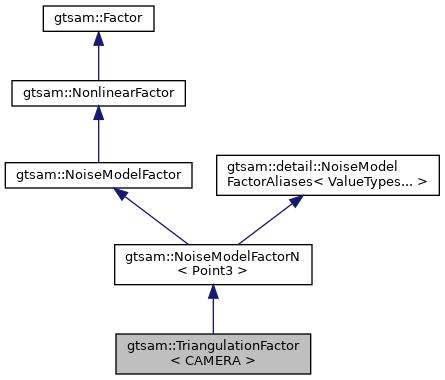
| using | Base = NoiseModelFactorN< Point3 > |
| shorthand for base class type More... | |
| using | This = TriangulationFactor< CAMERA > |
| shorthand for this class More... | |
| Protected Types inherited from gtsam::NoiseModelFactorN< Point3 > | |
| using | Base = NoiseModelFactor |
| using | KeyType = Key |
| using | MatrixTypeT = Matrix |
| using | OptionalMatrixTypeT = Matrix * |
| using | This = NoiseModelFactorN< ValueTypes... > |
| using | IsConvertible = typename std::enable_if< std::is_convertible< From, To >::value, void >::type |
| using | IndexIsValid = typename std::enable_if<(I >=1) &&(I<=N), void >::type |
| using | ContainerElementType = typename std::decay< decltype(*std::declval< Container >().begin())>::type |
| using | IsContainerOfKeys = IsConvertible< ContainerElementType< Container >, Key > |
| using | AreAllMatrixRefs = std::enable_if_t<(... &&std::is_convertible< Args, Matrix & >::value), Ret > |
| using | IsMatrixPointer = std::is_same< typename std::decay_t< Arg >, Matrix * > |
| using | IsNullpointer = std::is_same< typename std::decay_t< Arg >, std::nullptr_t > |
| using | AreAllMatrixPtrs = std::enable_if_t<(... &&(IsMatrixPointer< Args >::value||IsNullpointer< Args >::value)), Ret > |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
Protected Attributes | |
| const CAMERA | camera_ |
| CAMERA in which this landmark was seen. More... | |
| const Measurement | measured_ |
| 2D measurement More... | |
| const bool | throwCheirality_ |
| If true, rethrows Cheirality exceptions (default: false) More... | |
| const bool | verboseCheirality_ |
| If true, prints text for Cheirality exceptions (default: false) More... | |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
Detailed Description
template<class CAMERA>
class gtsam::TriangulationFactor< CAMERA >
Non-linear factor for a constraint derived from a 2D measurement. The calibration and pose are assumed known.
Definition at line 31 of file TriangulationFactor.h.
Member Typedef Documentation
◆ Base
|
protected |
shorthand for base class type
Definition at line 43 of file TriangulationFactor.h.
◆ Camera
| using gtsam::TriangulationFactor< CAMERA >::Camera = CAMERA |
CAMERA type.
Definition at line 36 of file TriangulationFactor.h.
◆ Measurement
| using gtsam::TriangulationFactor< CAMERA >::Measurement = typename CAMERA::Measurement |
shorthand for measurement type, e.g. Point2 or StereoPoint2
Definition at line 38 of file TriangulationFactor.h.
◆ shared_ptr
| using gtsam::TriangulationFactor< CAMERA >::shared_ptr = std::shared_ptr<This> |
shorthand for a smart pointer to a factor
Definition at line 60 of file TriangulationFactor.h.
◆ This
|
protected |
shorthand for this class
Definition at line 46 of file TriangulationFactor.h.
Constructor & Destructor Documentation
◆ TriangulationFactor() [1/2]
|
inline |
Default constructor.
Definition at line 66 of file TriangulationFactor.h.
◆ TriangulationFactor() [2/2]
|
inline |
Constructor with exception-handling flags
- Parameters
-
camera is the camera in which unknown landmark is seen measured is the 2 dimensional location of point in image (the measurement) model is the standard deviation pointKey is the index of the landmark throwCheirality determines whether Cheirality exceptions are rethrown verboseCheirality determines whether exceptions are printed for Cheirality
Definition at line 79 of file TriangulationFactor.h.
◆ ~TriangulationFactor()
|
inlineoverride |
Virtual destructor
Definition at line 92 of file TriangulationFactor.h.
Member Function Documentation
◆ clone()
|
inlineoverridevirtual |
- Returns
- a deep copy of this factor
Reimplemented from gtsam::NonlinearFactor.
Definition at line 96 of file TriangulationFactor.h.
◆ equals()
|
inlineoverridevirtual |
equals
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 115 of file TriangulationFactor.h.
◆ evaluateError()
|
inlineoverride |
Evaluate error h(x)-z and optionally derivatives.
Definition at line 122 of file TriangulationFactor.h.
◆ linearize()
|
inlineoverridevirtual |
Linearize to a JacobianFactor, does not support constrained noise model !  Hence
Hence 
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 148 of file TriangulationFactor.h.
◆ measured()
|
inline |
return the measurement
Definition at line 174 of file TriangulationFactor.h.
◆ print()
|
inlineoverridevirtual |
- Parameters
-
s optional string naming the factor keyFormatter optional formatter useful for printing Symbols
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 106 of file TriangulationFactor.h.
◆ throwCheirality()
|
inline |
return flag for throwing cheirality exceptions
Definition at line 184 of file TriangulationFactor.h.
◆ verboseCheirality()
|
inline |
return verbosity
Definition at line 179 of file TriangulationFactor.h.
Member Data Documentation
◆ A
|
mutable |
Definition at line 140 of file TriangulationFactor.h.
◆ Ab
|
mutable |
thread-safe (?) scratch memory for linearize
Definition at line 139 of file TriangulationFactor.h.
◆ b
|
mutable |
Definition at line 141 of file TriangulationFactor.h.
◆ camera_
|
protected |
CAMERA in which this landmark was seen.
Definition at line 49 of file TriangulationFactor.h.
◆ measured_
|
protected |
2D measurement
Definition at line 50 of file TriangulationFactor.h.
◆ throwCheirality_
|
protected |
If true, rethrows Cheirality exceptions (default: false)
Definition at line 53 of file TriangulationFactor.h.
◆ verboseCheirality_
|
protected |
If true, prints text for Cheirality exceptions (default: false)
Definition at line 54 of file TriangulationFactor.h.
The documentation for this class was generated from the following file: