A 3D Pose SLAM example that reads input from g2o, and initializes the Pose3 using InitializePose3 Syntax for the script is ./Pose3Localization input.g2o output.g2o. More...
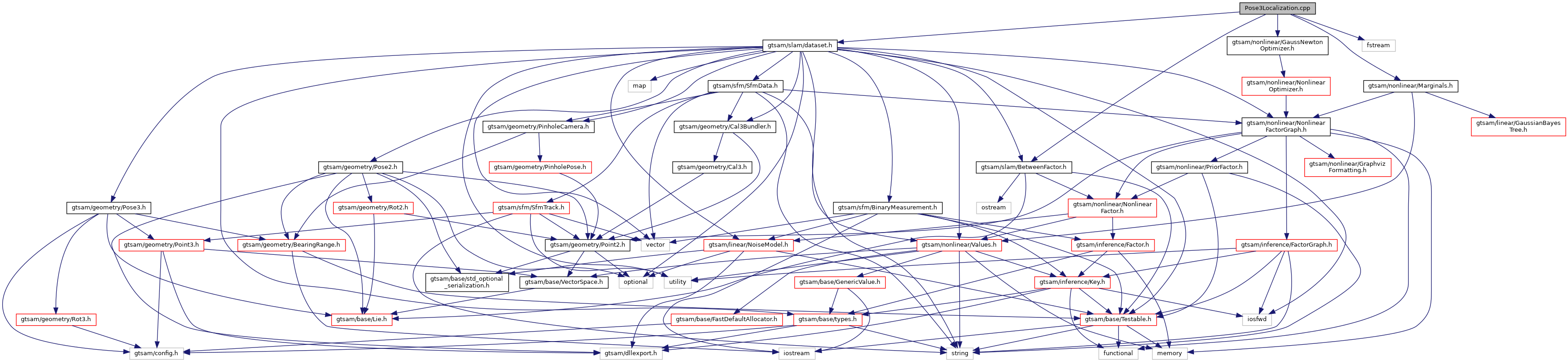
#include <gtsam/slam/dataset.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/nonlinear/GaussNewtonOptimizer.h>#include <gtsam/nonlinear/Marginals.h>#include <fstream>
Include dependency graph for Pose3Localization.cpp:
Go to the source code of this file.
Functions | |
| int | main (const int argc, const char *argv[]) |
Detailed Description
A 3D Pose SLAM example that reads input from g2o, and initializes the Pose3 using InitializePose3 Syntax for the script is ./Pose3Localization input.g2o output.g2o.
- Date
- Aug 25, 2014
Definition in file Pose3Localization.cpp.
Function Documentation
◆ main()
Definition at line 29 of file Pose3Localization.cpp.