#include "point_cloud_base.h"#include "rviz/helpers/color.h"#include "rviz/properties/forwards.h"#include "ogre_tools/point_cloud.h"#include "sensor_msgs/LaserScan.h"#include <boost/shared_ptr.hpp>#include <boost/thread.hpp>#include <message_filters/subscriber.h>#include <tf/message_filter.h>#include <deque>#include <queue>#include <vector>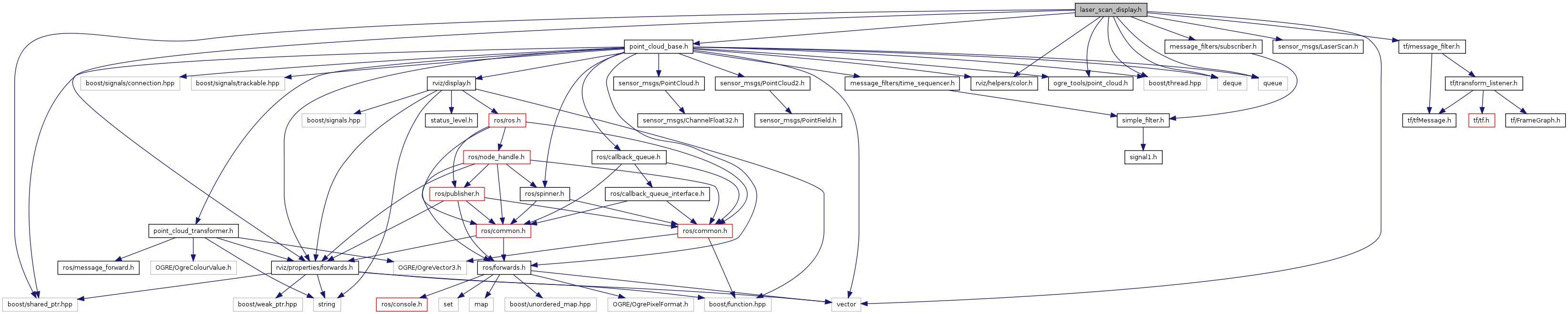
Go to the source code of this file.
Classes | |
| class | rviz::LaserScanDisplay |
| Visualizes a laser scan, received as a sensor_msgs::LaserScan. More... | |
Namespaces | |
| namespace | laser_geometry |
| namespace | rviz |

