#include "pr2_mechanism_controllers/trajectory.h"#include <angles/angles.h>#include <cstdlib>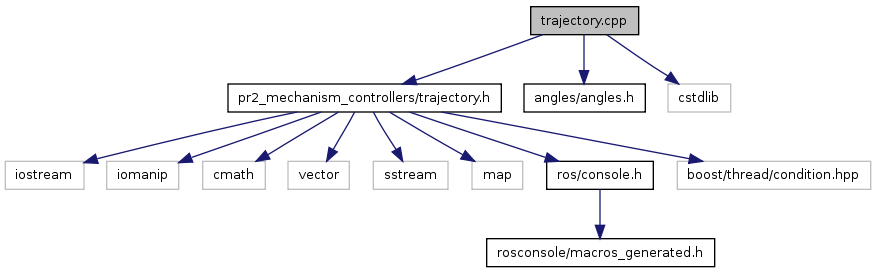
Go to the source code of this file.
Defines | |
| #define | EPS_TRAJECTORY 1.0e-8 |
| #define | MAX_ALLOWABLE_TIME 1.0e8 |
| #define | MAX_COEFF_SIZE 5 |
| #define | MAX_NUM_POINTS 1000 |
| #define EPS_TRAJECTORY 1.0e-8 |
Definition at line 37 of file trajectory.cpp.
| #define MAX_ALLOWABLE_TIME 1.0e8 |
Definition at line 36 of file trajectory.cpp.
| #define MAX_COEFF_SIZE 5 |
Definition at line 40 of file trajectory.cpp.
| #define MAX_NUM_POINTS 1000 |
Definition at line 39 of file trajectory.cpp.

