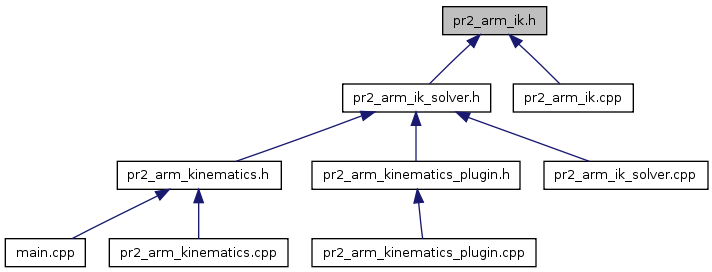
#include <urdf/model.h>#include <Eigen/Core>#include <Eigen/LU>#include <kdl/chainiksolver.hpp>#include <pr2_arm_kinematics/pr2_arm_kinematics_utils.h>#include <pr2_arm_kinematics/pr2_arm_kinematics_constants.h>
Go to the source code of this file.
Classes | |
| class | pr2_arm_kinematics::PR2ArmIK |
Namespaces | |
| namespace | pr2_arm_kinematics |

