#include "planning_environment/models/robot_models.h"#include <tf/transform_datatypes.h>#include <tf/transform_listener.h>#include <tf/message_filter.h>#include <message_filters/subscriber.h>#include <sensor_msgs/JointState.h>#include <arm_navigation_msgs/RobotState.h>#include <boost/bind.hpp>#include <vector>#include <string>#include <map>#include <planning_models/kinematic_state.h>
Go to the source code of this file.
Classes | |
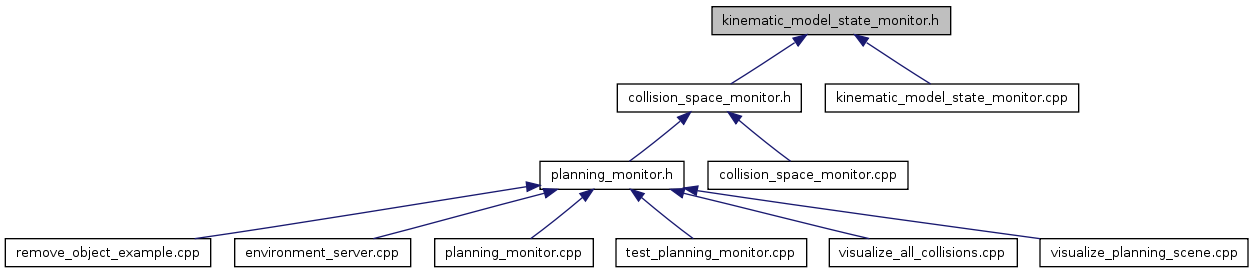
| class | planning_environment::KinematicModelStateMonitor |
| KinematicModelStateMonitor is a class that monitors the robot state for the kinematic model defined in RobotModels If the pose is not included, the robot state is the frame of the link it attaches to the world. If the pose is included, the frame of the robot is the one in which the pose is published. More... | |
Namespaces | |
| namespace | planning_environment |

