#include <ros/ros.h>#include <nodemon/state_publisher.h>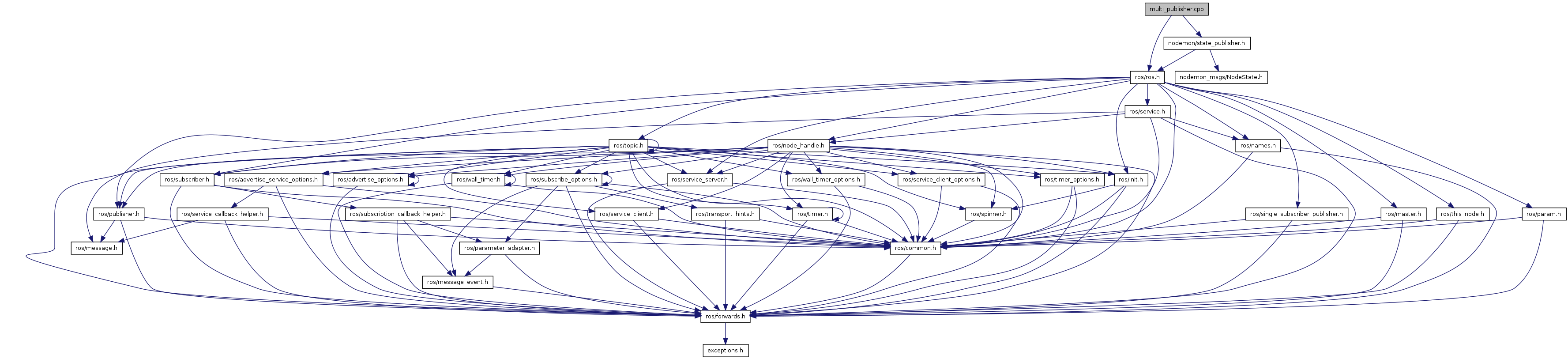
Go to the source code of this file.
Functions | |
| void | add_fake_node (std::string nodename, uint8_t state) |
| int | main (int argc, char **argv) |
| void | timer_cb (const ros::WallTimerEvent &event) |
Variables | |
| std::map< std::string, nodemon_msgs::NodeState > | g_nodes |
| ros::Publisher | g_pub |
| unsigned int | msgnum = 0 |
| void add_fake_node | ( | std::string | nodename, | |
| uint8_t | state | |||
| ) |
Definition at line 61 of file multi_publisher.cpp.
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
Definition at line 74 of file multi_publisher.cpp.
| void timer_cb | ( | const ros::WallTimerEvent & | event | ) |
Definition at line 35 of file multi_publisher.cpp.
| std::map<std::string, nodemon_msgs::NodeState> g_nodes |
Definition at line 31 of file multi_publisher.cpp.
Definition at line 30 of file multi_publisher.cpp.
| unsigned int msgnum = 0 |
Definition at line 33 of file multi_publisher.cpp.

