#include "object_manipulator/tools/grasp_marker_publisher.h"#include <string>#include <tf/transform_datatypes.h>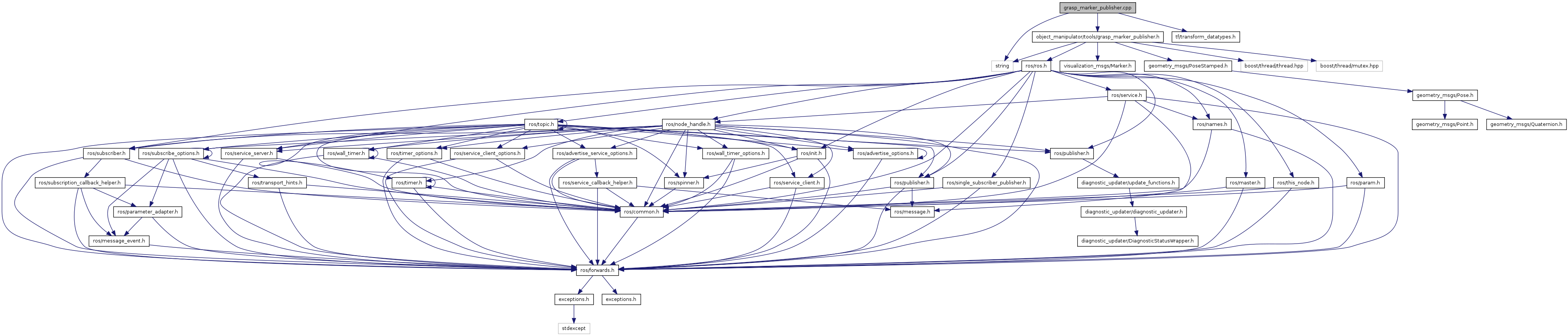
Go to the source code of this file.
Namespaces | |
| namespace | object_manipulator |
Helper functions for using image regions of PointCloud2s. | |
Variables | |
| static const std::string | object_manipulator::MARKERS_NAMESPACE = "grasp_markers" |
| static const std::string | object_manipulator::MARKERS_OUT_NAME = "grasp_execution_markers" |

