#include <art_nav/GraphSearch.h>#include <art_map/euclidean_distance.h>#include <float.h>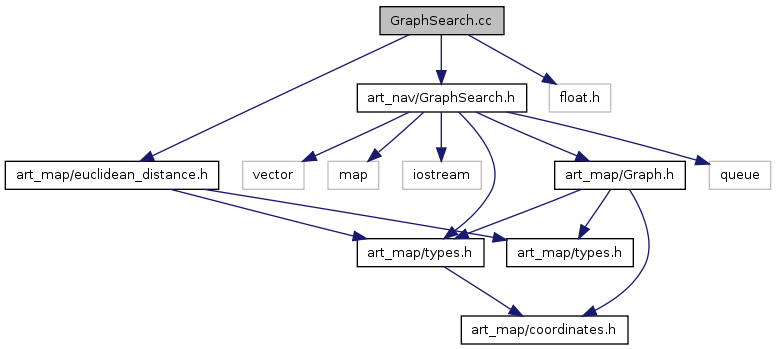
Go to the source code of this file.
Classes | |
| class | GraphSearch::PossiblePathComparision |
Namespaces | |
| namespace | GraphSearch |
Typedefs | |
| typedef std::priority_queue < PossiblePath, std::vector < PossiblePath > , PossiblePathComparision > | GraphSearch::PathPriorityQueue |
| typedef std::pair< std::pair < double, double > , WayPointEdgeList > | GraphSearch::PossiblePath |
Functions | |
| void | GraphSearch::add_to_queue (const Graph &graph, PathPriorityQueue *q, waypt_index_t from_index, PossiblePath &old_possible_path, const waypt_index_t goal_id, float speedlimit, int prev_start_index) |
| WayPointEdgeList | GraphSearch::astar_search (const Graph &graph, waypt_index_t start_id, waypt_index_t goal_id, float speedlimit=1.0) |
| double | GraphSearch::cost (const Graph &graph, const WayPointEdge &edge, float speedlimit) |
| WayPointNodeList | GraphSearch::edge_list_to_node_list (const Graph &graph, WayPointEdgeList &edges) |
| double | GraphSearch::heuristic (const Graph &graph, const waypt_index_t start_id, const waypt_index_t goal_id, float speedlimit) |
| void | GraphSearch::print_edge_list (WayPointEdgeList &edges, const Graph &graph) |
| void | GraphSearch::print_possible_path (PossiblePath &pp, const Graph &graph) |
| double | GraphSearch::time_along_edge (const Graph &graph, const WayPointEdge &edge, float speedlimit) |
| double | GraphSearch::time_between_nodes (const WayPointNode &start, const WayPointNode &end, float speedlimit) |

