#include <pluginlib/class_list_macros.h>#include <nodelet/nodelet.h>#include <ros/ros.h>#include <sensor_msgs/PointCloud.h>#include <velodyne/data_xyz.h>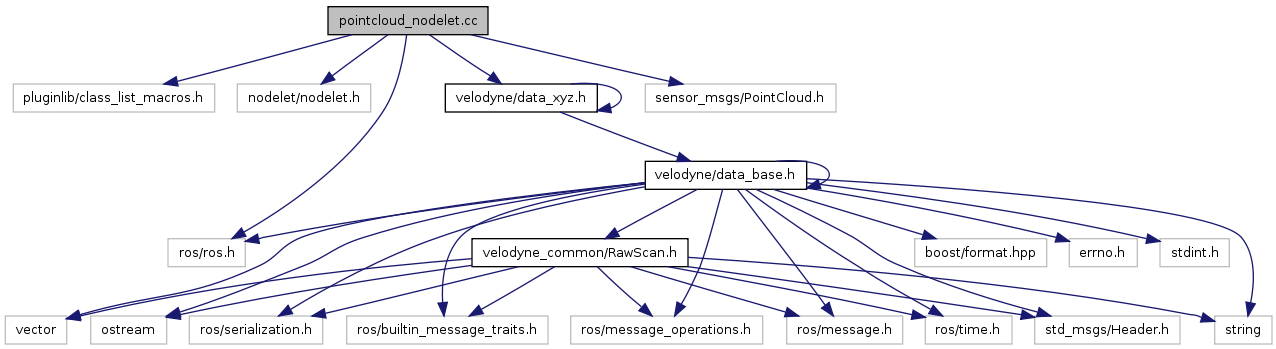
Go to the source code of this file.
Classes | |
| class | PointCloudNodelet |
Functions | |
| PLUGINLIB_DECLARE_CLASS (velodyne_common, PointCloudNodelet, PointCloudNodelet, nodelet::Nodelet) | |
This ROS nodelet converts raw Velodyne HDL-64E 3D LIDAR data to a PointCloud.
Definition in file pointcloud_nodelet.cc.
| PLUGINLIB_DECLARE_CLASS | ( | velodyne_common | , | |
| PointCloudNodelet | , | |||
| PointCloudNodelet | , | |||
| nodelet::Nodelet | ||||
| ) |

