#include <DiscreteSpaceTimeInformation.h>
Public Member Functions | |
| virtual void | ConvertStateIDPathintoXYThetaPath (vector< int > *stateIDPath, vector< SBPL_4Dpt_t > *xythetaPath)=0 |
| virtual void | GetCoordFromState (int stateID, int &x, int &y, int &theta, int &t) const =0 |
| virtual void | getExpansions (vector< SBPL_4Dpt_t > *p) |
| virtual unsigned char | GetMapCost (int x, int y)=0 |
| virtual int | getNumBubbles () |
| virtual void | GetSuccs (int SourceStateID, vector< int > *SuccIDV, vector< int > *CostV, vector< int > *stateBubbles, vector< int > *bubbleCollisions) |
| virtual void | GetSuccs (int SourceStateID, vector< int > *SuccIDV, vector< int > *CostV)=0 |
| virtual bool | InitializeEnv (int width, int height, const unsigned char *mapdata, double startx, double starty, double starttheta, double startTime, double goalx, double goaly, double goaltheta, double goaltol_x, double goaltol_y, double goaltol_theta, const vector< sbpl_2Dpt_t > &perimeterptsV, double cellsize_m, double timeResolution, double nominalvel_mpersecs, double timetoturn45degsinplace_secs, unsigned char obsthresh, unsigned char dynobsthresh, const char *sMotPrimFile, vector< SBPL_DynamicObstacle_t > &dynObs)=0 |
| virtual void | Relax (int sourceID, int targetID) |
| virtual bool | setDynamicObstacles (vector< SBPL_DynamicObstacle_t > dynObs, bool reset_states=true)=0 |
| virtual int | SetGoal (double x, double y, double theta)=0 |
| virtual int | SetStart (double x, double y, double theta, double startTime)=0 |
| virtual bool | UpdateCost (int x, int y, unsigned char newcost)=0 |
Definition at line 7 of file DiscreteSpaceTimeInformation.h.
| virtual void DiscreteSpaceTimeInformation::ConvertStateIDPathintoXYThetaPath | ( | vector< int > * | stateIDPath, | |
| vector< SBPL_4Dpt_t > * | xythetaPath | |||
| ) | [pure virtual] |
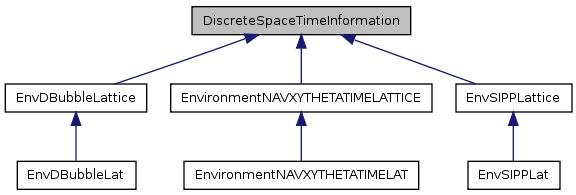
Implemented in EnvDBubbleLat, EnvironmentNAVXYTHETATIMELAT, and EnvSIPPLat.
| virtual void DiscreteSpaceTimeInformation::GetCoordFromState | ( | int | stateID, | |
| int & | x, | |||
| int & | y, | |||
| int & | theta, | |||
| int & | t | |||
| ) | const [pure virtual] |
Implemented in EnvDBubbleLat, EnvironmentNAVXYTHETATIMELAT, and EnvSIPPLat.
| virtual void DiscreteSpaceTimeInformation::getExpansions | ( | vector< SBPL_4Dpt_t > * | p | ) | [inline, virtual] |
Reimplemented in EnvSIPPLat.
Definition at line 19 of file DiscreteSpaceTimeInformation.h.
| virtual unsigned char DiscreteSpaceTimeInformation::GetMapCost | ( | int | x, | |
| int | y | |||
| ) | [pure virtual] |
Implemented in EnvDBubbleLattice, EnvironmentNAVXYTHETATIMELATTICE, and EnvSIPPLattice.
| virtual int DiscreteSpaceTimeInformation::getNumBubbles | ( | ) | [inline, virtual] |
Reimplemented in EnvDBubbleLattice.
Definition at line 11 of file DiscreteSpaceTimeInformation.h.
| virtual void DiscreteSpaceTimeInformation::GetSuccs | ( | int | SourceStateID, | |
| vector< int > * | SuccIDV, | |||
| vector< int > * | CostV, | |||
| vector< int > * | stateBubbles, | |||
| vector< int > * | bubbleCollisions | |||
| ) | [inline, virtual] |
Reimplemented in EnvDBubbleLattice.
Definition at line 9 of file DiscreteSpaceTimeInformation.h.
| virtual void DiscreteSpaceTimeInformation::GetSuccs | ( | int | SourceStateID, | |
| vector< int > * | SuccIDV, | |||
| vector< int > * | CostV | |||
| ) | [pure virtual] |
Implemented in EnvDBubbleLattice, EnvironmentNAVXYTHETATIMELATTICE, and EnvSIPPLattice.
| virtual bool DiscreteSpaceTimeInformation::InitializeEnv | ( | int | width, | |
| int | height, | |||
| const unsigned char * | mapdata, | |||
| double | startx, | |||
| double | starty, | |||
| double | starttheta, | |||
| double | startTime, | |||
| double | goalx, | |||
| double | goaly, | |||
| double | goaltheta, | |||
| double | goaltol_x, | |||
| double | goaltol_y, | |||
| double | goaltol_theta, | |||
| const vector< sbpl_2Dpt_t > & | perimeterptsV, | |||
| double | cellsize_m, | |||
| double | timeResolution, | |||
| double | nominalvel_mpersecs, | |||
| double | timetoturn45degsinplace_secs, | |||
| unsigned char | obsthresh, | |||
| unsigned char | dynobsthresh, | |||
| const char * | sMotPrimFile, | |||
| vector< SBPL_DynamicObstacle_t > & | dynObs | |||
| ) | [pure virtual] |
| mapdata | if mapdata is NULL the grid is initialized to all freespace |
Implemented in EnvDBubbleLattice, EnvironmentNAVXYTHETATIMELATTICE, and EnvSIPPLattice.
| virtual void DiscreteSpaceTimeInformation::Relax | ( | int | sourceID, | |
| int | targetID | |||
| ) | [inline, virtual] |
Reimplemented in EnvDBubbleLat.
Definition at line 10 of file DiscreteSpaceTimeInformation.h.
| virtual bool DiscreteSpaceTimeInformation::setDynamicObstacles | ( | vector< SBPL_DynamicObstacle_t > | dynObs, | |
| bool | reset_states = true | |||
| ) | [pure virtual] |
Implemented in EnvDBubbleLat, EnvironmentNAVXYTHETATIMELAT, and EnvSIPPLat.
| virtual int DiscreteSpaceTimeInformation::SetGoal | ( | double | x, | |
| double | y, | |||
| double | theta | |||
| ) | [pure virtual] |
Implemented in EnvDBubbleLat, EnvironmentNAVXYTHETATIMELAT, and EnvSIPPLat.
| virtual int DiscreteSpaceTimeInformation::SetStart | ( | double | x, | |
| double | y, | |||
| double | theta, | |||
| double | startTime | |||
| ) | [pure virtual] |
Implemented in EnvDBubbleLat, EnvironmentNAVXYTHETATIMELAT, and EnvSIPPLat.
| virtual bool DiscreteSpaceTimeInformation::UpdateCost | ( | int | x, | |
| int | y, | |||
| unsigned char | newcost | |||
| ) | [pure virtual] |
Implemented in EnvDBubbleLattice, EnvironmentNAVXYTHETATIMELATTICE, and EnvSIPPLattice.

