ROS 2 Service Load Balancing
Objective
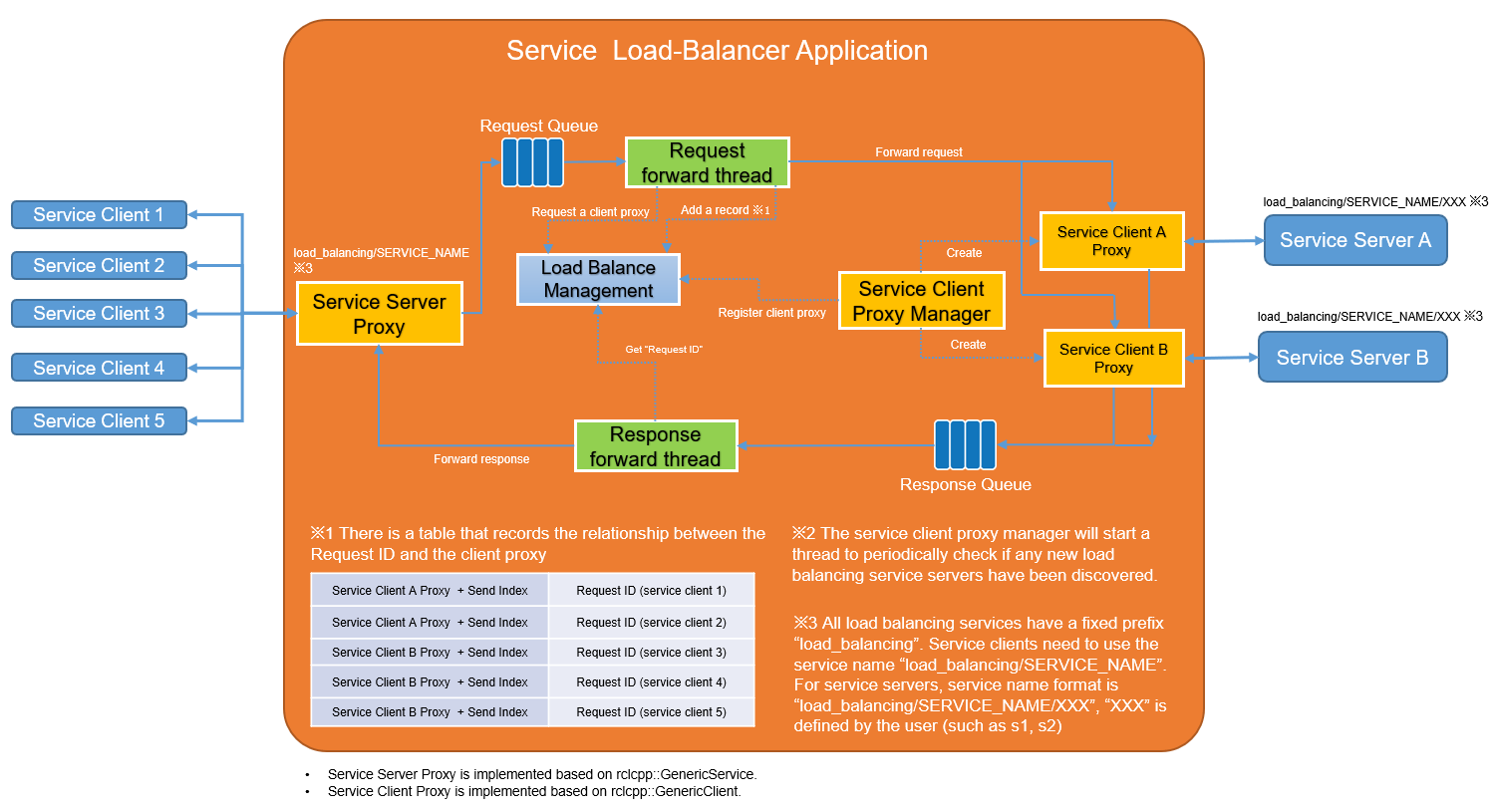
ROS 2 service load-balancing in application layer without protocol change.
Support multiple service servers on the same service path to have robustness and load-balancing mechanism.
Scale / Offload ROS 2 service server/client application with remapping but code modification.
How to use
Usage:
service_load_balancing [-h|--help] [-s|--service-name SERVICE_NAME] [-t|--service-type SERVICE_TYPE] [--strategy XXX] [-i|--interval TIME]
--strategy choose one of "round_robin", "less_requests" and "less_response_time"
If not set, "round_robin" is used as default.
"round_robin": select the service server in order.
"less_requests": select the service server with the fewest requests.
"less_response_time": select the service server with the shortest average response time.
--interval Interval to discovery service servers. Unit is second.
If not set, default is 1s.
Configuration Parameters
Service Name: This is the original service name. The service server proxy adds a fixed prefix “load_balancing”, so the proxy service name becomes “load_balancing/SERVICE_NAME”.Service Type: e.g) “example_interfaces/srv/AddTwoInts”Strategy(optional): Strategy for load balancing. “round_robin”(default), “less_requests” and “less_response_time”.Interval(Optinoal): Duration(default 1 sec) how often the service server discovery action is performed.
Example
$ ros2 run service_load_balancing service_load_balancing -s add_two_ints -t example_interfaces/srv/AddTwoInts --strategy round_robin -i 1
[INFO] [1727418589.343051995] [main]:
Load balancing service name: /load_balancing/add_two_ints
Service type: example_interfaces/srv/AddTwoInts
Load balancing strategy: round_robin
Interval to discovery server: 1s
------------------------------
Service client remap service name to /load_balancing/add_two_ints
Service server remap service name to /load_balancing/add_two_ints/XXX
It provides hints for the prefixed service names where clients and servers can connect.
service client should remap service name to “/load_balancing/add_two_ints”.
service server should remap service name to “/load_balancing/add_two_ints/XXX”. (
XXXneeds to be configured by user with service backend.)
Start 2 service servers backend
Run service server backend with
s1.
$ ros2 run demo_nodes_cpp add_two_ints_server --ros-args -r add_two_ints:=load_balancing/add_two_ints/s1
Run service server backend with
s2.
$ ros2 run demo_nodes_cpp add_two_ints_server --ros-args -r add_two_ints:=load_balancing/add_two_ints/s2
Those service backends are discovered and connected by service load-balancer.
Start 10 service clients
Open another terminal, run the this script
$ cat run_clients.sh
#!/bin/bash
for i in {1..10}
do
ros2 run demo_nodes_cpp add_two_ints_client_async --ros-args -r add_two_ints:=load_balancing/add_two_ints &
done
You will see logs that 5 requests have been received in the two terminals running the service server.

Project repository
https://github.com/barry-Xu-2018/service_ros2_load_balancing/