README
mrpt_pf_localization
Overview
This package provides a ROS 2 node for self-localization using 2D or 3D (SE(2) or SE(3)) particle filter-based algorithms and a number of different metric maps as reference maps to which to “compare” sensor observations.
In a sense, this package is an equivalent to the classic ROS 1 amcl, but with superpowers :-)
Features:
A number of different PF algorithms.
Different map types: Occupancy grid maps (as images, ROS yaml files, or in MRPT binary format), point clouds, beacon map (for range-only sensors). At present, these combinations are exposed in this node:
Map: occupancy grid, Sensor: anyone capable of generating a point cloud. Several occupancy grids, each at a different height, to be used for laser scans at the corresponding robot height.
Map: beacons at predefined 3D positions, Sensor: range-only. For Range-Only (RO) Localization.
Map: point cloud, Sensor: 2D or 3D Lidars (TO-DO as of Aug 2023).
GNSS (GPS) readings, in parallel to any of the above (TO-DO as of Aug 2023).
Multiple simultaneous sensors: The combinations above can be used together and their probabilistic information automatically fused together.
Configuration
The provided algorithms have parameters that can be grouped into three conceptual topics:
Algorithm: Parameters affecting the particle filter itself or the adaptive sampling method. These parameters can be set in the main config YAML file.
Actions: The motion model uncertainty. These parameters are also set in the main config YAML file.
Observations: These parameters are spread in part in the observations themselves (e.g. each lidar/sonar should carry information about how noisy it is), and the metric maps. The latter are key parameters and in MRPT are called likelihood options in each available metric map.
Metric map conceptual model
Metric map likelihood options are key for tuning the localization system, as they tell how much to “trust” sensor readings, how much to downsample their rays, etc.
When using as input a metric map that comes in MRPT native mrpt::maps::CMetricMap format
(this includes mp2p_icp’s metric map *.mm files), the map already comes with
its own set of likelihood parameters, defined at the time of creating the map in
the source application.
However, this mrpt_pf_localization node allows overriding the
likelihood options to ease tuning and adjusting without touching the original map.
When using non MRPT-native map sources (e.g. ROS gridmap yaml files), the only way to set these important options is via this overriding mechanism.
Refer to node launch arguments for details.
Demos
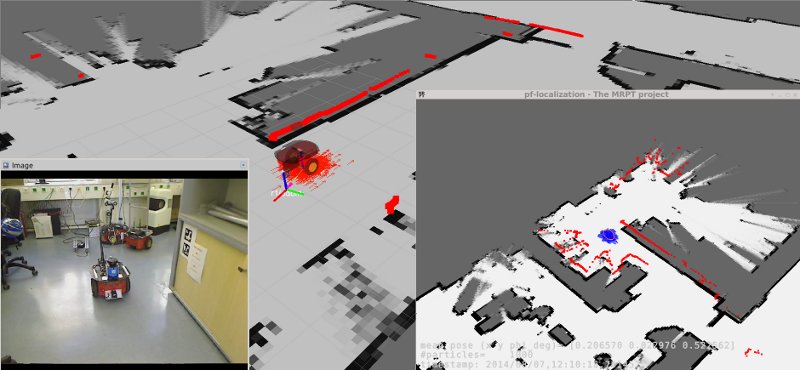
2D LIDAR localization with a gridmap and MVSim
Demo video. Run:
ros2 launch mrpt_tutorials demo_localization_pf_mvsim_2d_lidar.launch.py
to start:
mrpt_pf_localizationwith the map to be received via a ROS topic,mrpt_map_serverserver loading and publishing a gridmap as reference map via an ROS-styledmap.yamlfile,rviz2for visualization,mvsimto simulate a live robot that can be teleoperated.
Range-only (RO) localization with a set of fixed, known radio beacons
Run:
ros2 launch mrpt_localization demo_ro.launch
to start:
a dataset (rawlog format) including RO and odometry observations,
the mrpt localization with known beacon locations, and
RViz for visualization
Node: mrpt_pf_localization
Working rationale
The C++ ROS 2 node comprises an internal, independent PFLocalizationCore C++ class, which implements
the main functionality. It features an internal finite state machine (FSM) with these states:
UNINITIALIZED: The filter has been neither initialized nor parameters/map loaded. State after initialization. “Loops” in this state do nothing.TO_BE_INITIALIZED: Once the parameters have been loaded, and a map has been loaded (or if subscribed to a map topic, the topic data has been received), thePFLocalizationCoreis put into this state by the node. Upon next “loop”, the particles and data structures will be initialized.RUNNING: Normal state. At each “loop”, odometry (if present) is used together with sensors to localize the robot.
ROS 2 parameters
There is a core set of parameters to configure the particle filter algorithm itself, which is self-documented in the provided template parameters yaml file: params/default.config.yaml. Please, read that file and its comments for details.
If the initial_pose parameter is provided, and there is an occupancy gridmap, particles will be distributed
along free space cells only. Otherwise, they will be distributed in the box that circumscribes the confidence interval
of mean ±1 sigma of the uncertainty.
Subscribed topics
xxx
Published topics
xxx
Template ROS 2 launch files
This package provides launch/localization.launch.py:
ros2 launch mrpt_pf_localization localization.launch.py
which can be used in user projects to launch the MRPT PF localization node, by setting these launch arguments:
pf_params_file(Default: params/default.config.yaml): If defined, overrides the default particle filter algorithm.