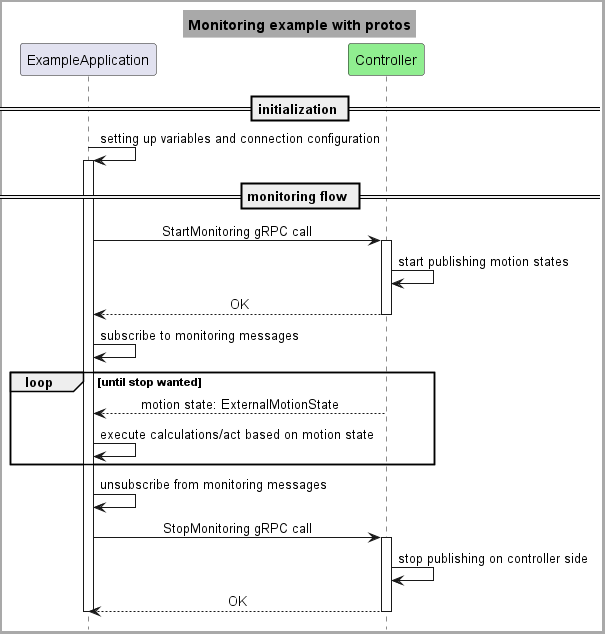
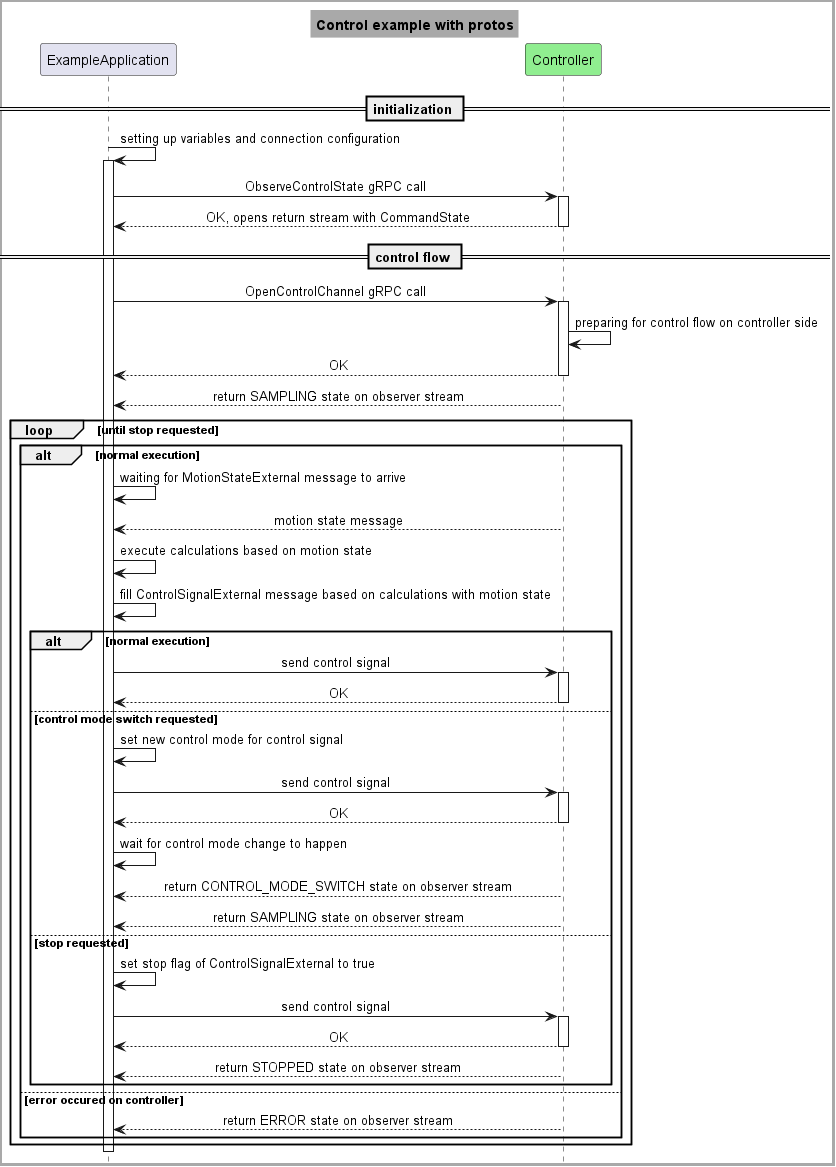
In this file we show how the SDK functions are mapped to the usage with raw proto files. We need the motion_services_ecs.proto to see the required gRPC calls. In the real-time data flow we get messages described by the motion_state_external.proto and send ones described by the control_signal_external.proto file.
Control example with raw protos:
Monitoring example with raw protos: