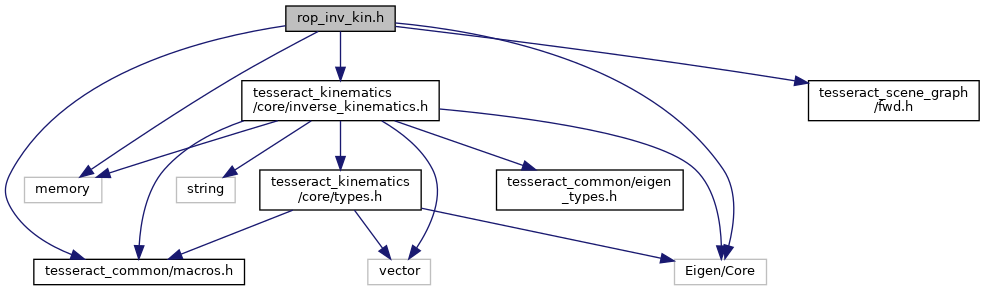
#include <tesseract_common/macros.h>#include <memory>#include <Eigen/Core>#include <tesseract_scene_graph/fwd.h>#include <tesseract_kinematics/core/inverse_kinematics.h>
Include dependency graph for rop_inv_kin.h:
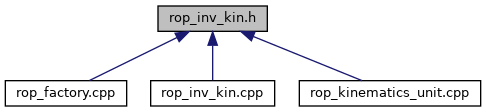
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tesseract_kinematics::ROPInvKin |
| Robot on Positioner Inverse kinematic implementation. More... | |
Namespaces | |
| tesseract_kinematics | |
Variables | |
| static const std::string | tesseract_kinematics::DEFAULT_ROP_INV_KIN_SOLVER_NAME = "ROPInvKin" |