Common Tesseract Utility Functions. More...
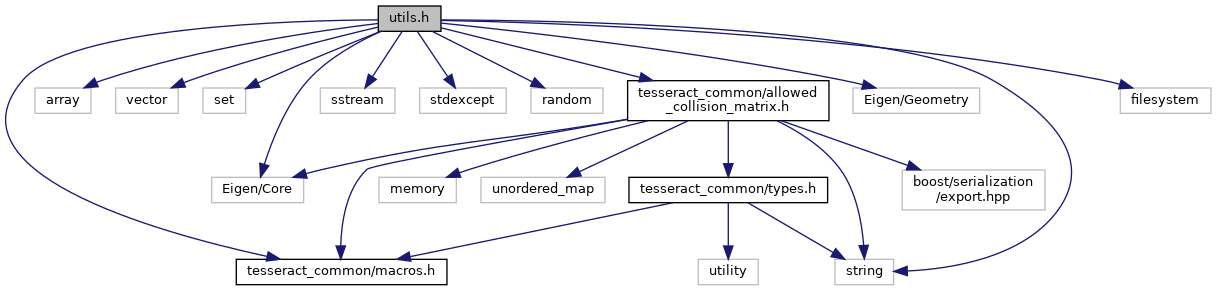
#include <tesseract_common/macros.h>#include <array>#include <vector>#include <set>#include <string>#include <sstream>#include <stdexcept>#include <random>#include <Eigen/Core>#include <Eigen/Geometry>#include <tesseract_common/allowed_collision_matrix.h>#include <filesystem>
Include dependency graph for utils.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| tesseract_common | |
| tinyxml2 | |
Functions | |
| bool | tesseract_common::almostEqualRelativeAndAbs (const Eigen::Ref< const Eigen::VectorXd > &v1, const Eigen::Ref< const Eigen::VectorXd > &v2, const Eigen::Ref< const Eigen::VectorXd > &max_diff, const Eigen::Ref< const Eigen::VectorXd > &max_rel_diff) |
| Check if two Eigen VectorXd are relatively and absolute equal. More... | |
| bool | tesseract_common::almostEqualRelativeAndAbs (const Eigen::Ref< const Eigen::VectorXd > &v1, const Eigen::Ref< const Eigen::VectorXd > &v2, double max_diff=1e-6, double max_rel_diff=std::numeric_limits< double >::epsilon()) |
| Check if two Eigen VectorXd are relatively and absolute equal. More... | |
| bool | tesseract_common::almostEqualRelativeAndAbs (double a, double b, double max_diff=1e-6, double max_rel_diff=std::numeric_limits< double >::epsilon()) |
| Check if two double are relatively equal. More... | |
| Eigen::VectorXd | tesseract_common::calcJacobianTransformErrorDiff (const Eigen::Isometry3d &target, const Eigen::Isometry3d &source, const Eigen::Isometry3d &source_perturbed) |
| Calculate jacobian transform error difference expressed in the target frame coordinate system. More... | |
| Eigen::VectorXd | tesseract_common::calcJacobianTransformErrorDiff (const Eigen::Isometry3d &target, const Eigen::Isometry3d &target_perturbed, const Eigen::Isometry3d &source, const Eigen::Isometry3d &source_perturbed) |
| Calculate jacobian transform error difference expressed in the target frame coordinate system. More... | |
| Eigen::Vector3d | tesseract_common::calcRotationalError (const Eigen::Ref< const Eigen::Matrix3d > &R) |
| Calculate the rotation error vector given a rotation error matrix where the angle is between [-pi, pi]. More... | |
| Eigen::VectorXd | tesseract_common::calcTransformError (const Eigen::Isometry3d &t1, const Eigen::Isometry3d &t2) |
| Calculate error between two transforms expressed in t1 coordinate system. More... | |
| Eigen::Vector4d | tesseract_common::computeRandomColor () |
| This computes a random color RGBA [0, 1] with alpha set to 1. More... | |
| Eigen::VectorXd | tesseract_common::concat (const Eigen::VectorXd &a, const Eigen::VectorXd &b) |
| Concatenate two vector. More... | |
| std::string | tesseract_common::fileToString (const std::filesystem::path &filepath) |
| Read in the contents of the file into a string. More... | |
| Eigen::VectorXd | tesseract_common::generateRandomNumber (const Eigen::Ref< const Eigen::MatrixX2d > &limits) |
| Given a set of limits it will generate a vector of random numbers between the limit. More... | |
| std::vector< std::string > | tesseract_common::getAllowedCollisions (const std::vector< std::string > &link_names, const AllowedCollisionEntries &acm_entries, bool remove_duplicates=true) |
| Gets allowed collisions for a set of link names. More... | |
| std::string | tesseract_common::getTempPath () |
| Get the host temp directory path. More... | |
| std::string | tesseract_common::getTimestampString () |
| Get Timestamp string. More... | |
| template<typename T > | |
| bool | tesseract_common::isIdentical (const std::vector< T > &vec1, const std::vector< T > &vec2, bool ordered=true, const std::function< bool(const T &, const T &)> &equal_pred=[](const T &v1, const T &v2) { return v1==v2;}, const std::function< bool(const T &, const T &)> &comp=[](const T &v1, const T &v2) { return v1< v2;}) |
| Check if two vector of strings are identical. More... | |
| template<typename ValueType , std::size_t Size> | |
| bool | tesseract_common::isIdenticalArray (const std::array< ValueType, Size > &array_1, const std::array< ValueType, Size > &array_2, const std::function< bool(const ValueType &, const ValueType &)> &value_eq=[](const ValueType &v1, const ValueType &v2) { return v1==v2;}) |
| Checks if 2 arrays are identical. More... | |
| template<typename KeyValueContainerType , typename ValueType > | |
| bool | tesseract_common::isIdenticalMap (const KeyValueContainerType &map_1, const KeyValueContainerType &map_2, const std::function< bool(const ValueType &, const ValueType &)> &value_eq=[](const ValueType &v1, const ValueType &v2) { return v1==v2;}) |
| Checks if 2 maps are identical. More... | |
| template<typename ValueType > | |
| bool | tesseract_common::isIdenticalSet (const std::set< ValueType > &set_1, const std::set< ValueType > &set_2, const std::function< bool(const ValueType &, const ValueType &)> &value_eq=[](const ValueType &v1, const ValueType &v2) { return v1==v2;}) |
| Checks if 2 sets are identical. More... | |
| bool | tesseract_common::isNumeric (const std::string &s) |
| Determine if a string is a number. More... | |
| bool | tesseract_common::isNumeric (const std::vector< std::string > &sv) |
| Determine if each string in vector is a number. More... | |
| void | tesseract_common::jacobianChangeBase (Eigen::Ref< Eigen::MatrixXd > jacobian, const Eigen::Isometry3d &change_base) |
| Change the base coordinate system of the jacobian. More... | |
| void | tesseract_common::jacobianChangeRefPoint (Eigen::Ref< Eigen::MatrixXd > jacobian, const Eigen::Ref< const Eigen::Vector3d > &ref_point) |
| Change the reference point of the jacobian. More... | |
| void | tesseract_common::ltrim (std::string &s) |
| Left trim string. More... | |
| template<typename T > | |
| bool | tesseract_common::pointersComparison (const std::shared_ptr< T > &p1, const std::shared_ptr< T > &p2) |
| Comparison operator for the objects 2 points point to. More... | |
| template<typename T > | |
| bool | tesseract_common::pointersEqual (const std::shared_ptr< T > &p1, const std::shared_ptr< T > &p2) |
| Checks if 2 pointers point to objects that are ==. More... | |
| void | tesseract_common::printNestedException (const std::exception &e, int level=0) |
| Print a nested exception. More... | |
| int | tesseract_common::QueryDoubleAttributeRequired (const tinyxml2::XMLElement *xml_element, const char *name, double &value) |
| Query a double attribute from an xml element and print error log. More... | |
| int | tesseract_common::QueryIntAttributeRequired (const tinyxml2::XMLElement *xml_element, const char *name, int &value) |
| Query a int attribute from an xml element and print error log. More... | |
| int | tesseract_common::QueryStringAttribute (const tinyxml2::XMLElement *xml_element, const char *name, std::string &value) |
| Query a string attribute from an xml element. More... | |
| int | tesseract_common::QueryStringAttributeRequired (const tinyxml2::XMLElement *xml_element, const char *name, std::string &value) |
| Query a string attribute from an xml element and print error log. More... | |
| int | tesseract_common::QueryStringText (const tinyxml2::XMLElement *xml_element, std::string &text) |
| Query a string Text from xml element. More... | |
| int | tesseract_common::QueryStringValue (const tinyxml2::XMLAttribute *xml_attribute, std::string &value) |
| Query a string value from xml attribute. More... | |
| int | tesseract_common::QueryStringValue (const tinyxml2::XMLElement *xml_element, std::string &value) |
| Query a string value from xml element. More... | |
| void | tesseract_common::reorder (Eigen::Ref< Eigen::VectorXd > v, std::vector< Eigen::Index > order) |
| Reorder Eigen::VectorXd implace given index list. More... | |
| void | tesseract_common::rtrim (std::string &s) |
| Right trim string. More... | |
| template<typename... Args> | |
| std::string | tesseract_common::strFormat (const std::string &format, Args... args) |
| std::string | tesseract_common::StringAttribute (const tinyxml2::XMLElement *xml_element, const char *name, std::string default_value) |
| Get string attribute if exist. If it does not exist it returns the default value. More... | |
| template<typename FloatType > | |
| bool | tesseract_common::toNumeric (const std::string &s, FloatType &value) |
| Convert a string to a numeric value type. More... | |
| void | tesseract_common::trim (std::string &s) |
| Trim left and right of string. More... | |
| void | tesseract_common::twistChangeBase (Eigen::Ref< Eigen::VectorXd > twist, const Eigen::Isometry3d &change_base) |
| Change the base coordinate system of the Twist. More... | |
| void | tesseract_common::twistChangeRefPoint (Eigen::Ref< Eigen::VectorXd > twist, const Eigen::Ref< const Eigen::Vector3d > &ref_point) |
| Change the reference point of the provided Twist. More... | |
Variables | |
| static std::mt19937 | tesseract_common::mersenne { static_cast<std::mt19937::result_type>(std::time(nullptr)) } |
| Random number generator. More... | |
Detailed Description
Common Tesseract Utility Functions.
- Date
- January 18, 2018
- Version
- TODO
- Bug:
- No known bugs
- Copyright
- Copyright (c) 2017, Southwest Research Institute
- License
- Software License Agreement (Apache License)
- Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0
- Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
Definition in file utils.h.