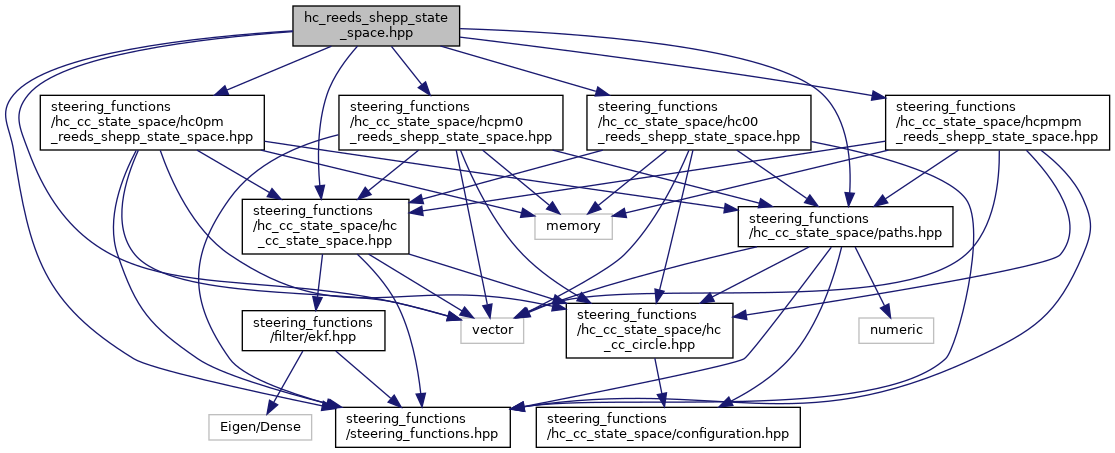
#include <vector>#include "steering_functions/hc_cc_state_space/hc_cc_state_space.hpp"#include "steering_functions/hc_cc_state_space/paths.hpp"#include "steering_functions/hc_cc_state_space/hc00_reeds_shepp_state_space.hpp"#include "steering_functions/hc_cc_state_space/hc0pm_reeds_shepp_state_space.hpp"#include "steering_functions/hc_cc_state_space/hcpm0_reeds_shepp_state_space.hpp"#include "steering_functions/hc_cc_state_space/hcpmpm_reeds_shepp_state_space.hpp"#include "steering_functions/steering_functions.hpp"
Include dependency graph for hc_reeds_shepp_state_space.hpp:
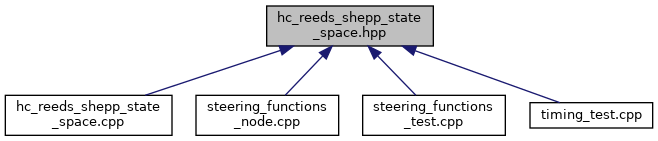
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | steering::HC_Reeds_Shepp_State_Space |
| An implementation of hybrid curvature (HC) steer with arbitrary curvature at the start and goal configuration. More... | |
Namespaces | |
| steering | |