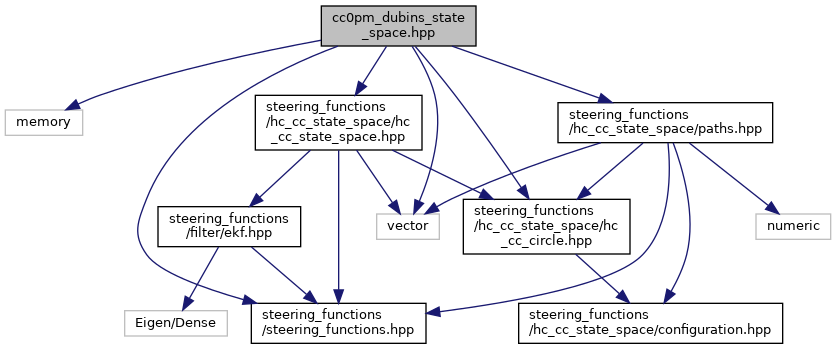
#include <memory>#include <vector>#include "steering_functions/hc_cc_state_space/hc_cc_circle.hpp"#include "steering_functions/hc_cc_state_space/hc_cc_state_space.hpp"#include "steering_functions/hc_cc_state_space/paths.hpp"#include "steering_functions/steering_functions.hpp"
Include dependency graph for cc0pm_dubins_state_space.hpp:
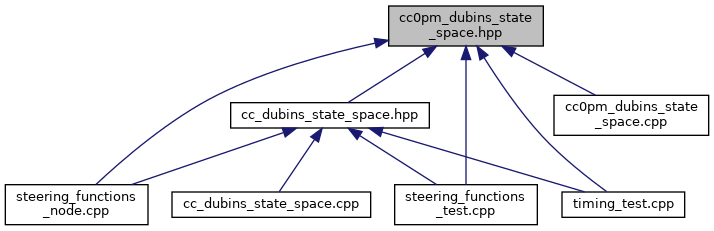
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | steering::CC0pm_Dubins_State_Space |
| An implementation of continuous curvature (CC) steer for a Dubins car with zero curvature at the start and either positive (p) or negative (n) max. curvature at the goal configuration. It evaluates all Dubins families and returns the shortest path. More... | |
Namespaces | |
| steering | |