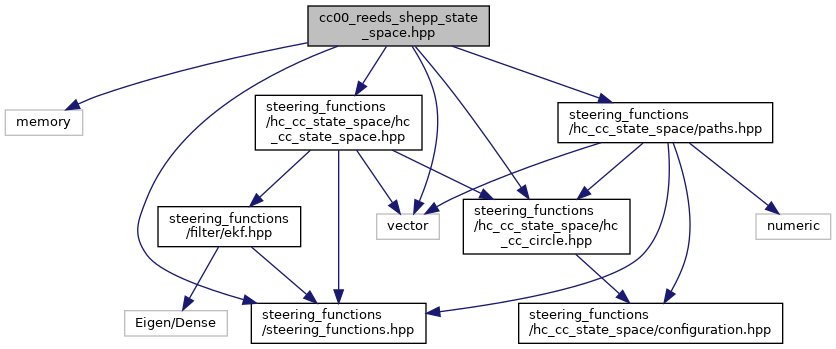
#include <memory>#include <vector>#include "steering_functions/hc_cc_state_space/hc_cc_circle.hpp"#include "steering_functions/hc_cc_state_space/hc_cc_state_space.hpp"#include "steering_functions/hc_cc_state_space/paths.hpp"#include "steering_functions/steering_functions.hpp"
Include dependency graph for cc00_reeds_shepp_state_space.hpp:
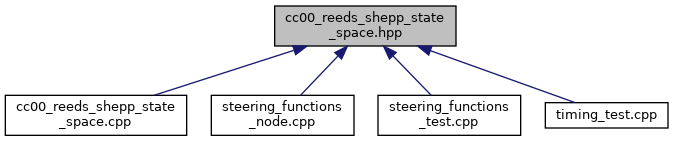
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | steering::CC00_Reeds_Shepp_State_Space |
| An implementation of continuous curvature (CC) steer for a Reeds-Shepp car with zero curvature at the start and goal configuration as described in: T. Fraichard and A. Scheuer, "From Reeds and Shepp's to continuous-
curvature paths," IEEE Transactions on Robotics (Volume 20, Issue: 6, Dec. 2004). It evaluates all Reeds-Shepp families plus the four families TTT, TcST, TScT, TcScT, where "T" stands for a turn, "S" for a straight line and "c" for a cusp, and returns the shortest path. Topological paths are not included in this implementation. More... | |
Namespaces | |
| steering | |