#include <fcntl.h>#include <sys/types.h>#include <termios.h>#include <boost/thread.hpp>#include <chrono>#include <string>#include <iostream>#include <fstream>#include <condition_variable>#include <atomic>#include <memory>#include <diagnostic_updater/diagnostic_updater.h>#include <rokubimini_serial/states.hpp>#include <rokubimini/Reading.hpp>#include <rokubimini/configuration/Configuration.hpp>#include <rokubimini/calibration/SensorCalibration.hpp>#include <rokubimini/configuration/SensorConfiguration.hpp>#include <rokubimini/configuration/ForceTorqueFilter.hpp>#include <rokubimini_serial/RokubiminiSerialCommunication.hpp>
Include dependency graph for RokubiminiSerialImpl.hpp:

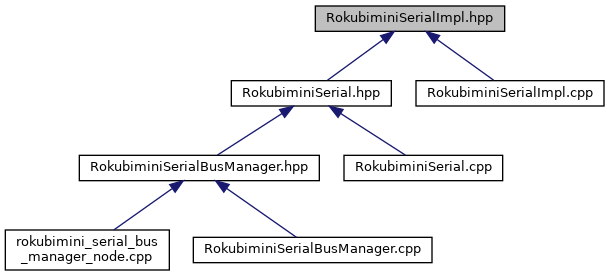
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| union | rokubimini::serial::AppOutput |
| The main output from the sensors in the device. More... | |
| struct | rokubimini::serial::BaudRateStruct |
| union | rokubimini::serial::DataStatus |
| The status of the sensor data. More... | |
| class | rokubimini::serial::RokubiminiSerialImpl |
| The Rokubimini Serial Implementation class. More... | |
| union | rokubimini::serial::RxFrame |
| The frame transmitted and received via the serial bus. More... | |
Namespaces | |
| rokubimini | |
| System dependencies. | |
| rokubimini::serial | |
Typedefs | |
| using | rokubimini::serial::RokubiminiSerialImplPtr = std::shared_ptr< RokubiminiSerialImpl > |
Variables | |
| const static std::map< uint32_t, BaudRateStruct > | rokubimini::serial::CODE_TO_BAUD_RATE_MAP |