PSENscan software architecture
The following diagram shows the overall architecture of the PSENscan software.
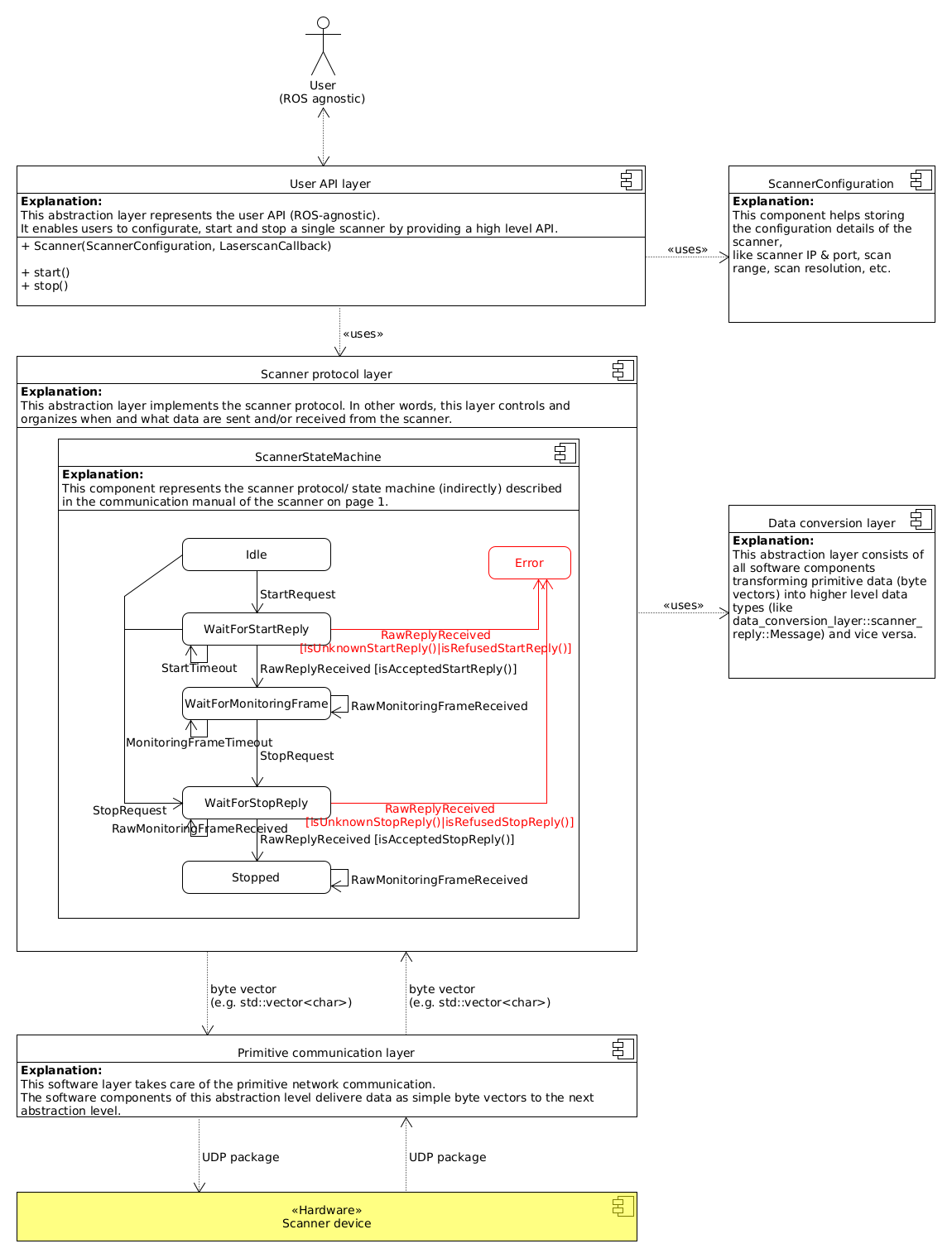
Diagram showing the high level overall architecture of the system
Detailed Description
The overall architecture should give a good idea of how the driver is supposed to work. For more details we recommend taking a look at the source code itself:
- For the ROS part we refer to
psen_scan_v2::ROSScannerNodeT. - The referenced User API is implemented by
psen_scan_v2_standalone::ScannerV2. - For the Scanner protocol layer please check
psen_scan_v2_standalone::protocol_layer::ScannerStateMachine. - Data Serialization and Deserialization is for example handled in
psen_scan_v2_standalone::data_conversion_layer::monitoring_frame::deserialize()orpsen_scan_v2_standalone::data_conversion_layer::scanner_reply::serialize(). - For the Primitive communication layer we recommend taking a look at
psen_scan_v2_standalone::communication_layer::UdpClientImpl.
Workflow
To help understand the workflow the following sequence diagram shows the interaction between the software components in a typical use case scenario (User calls start, receives a laserscan and calls stop).
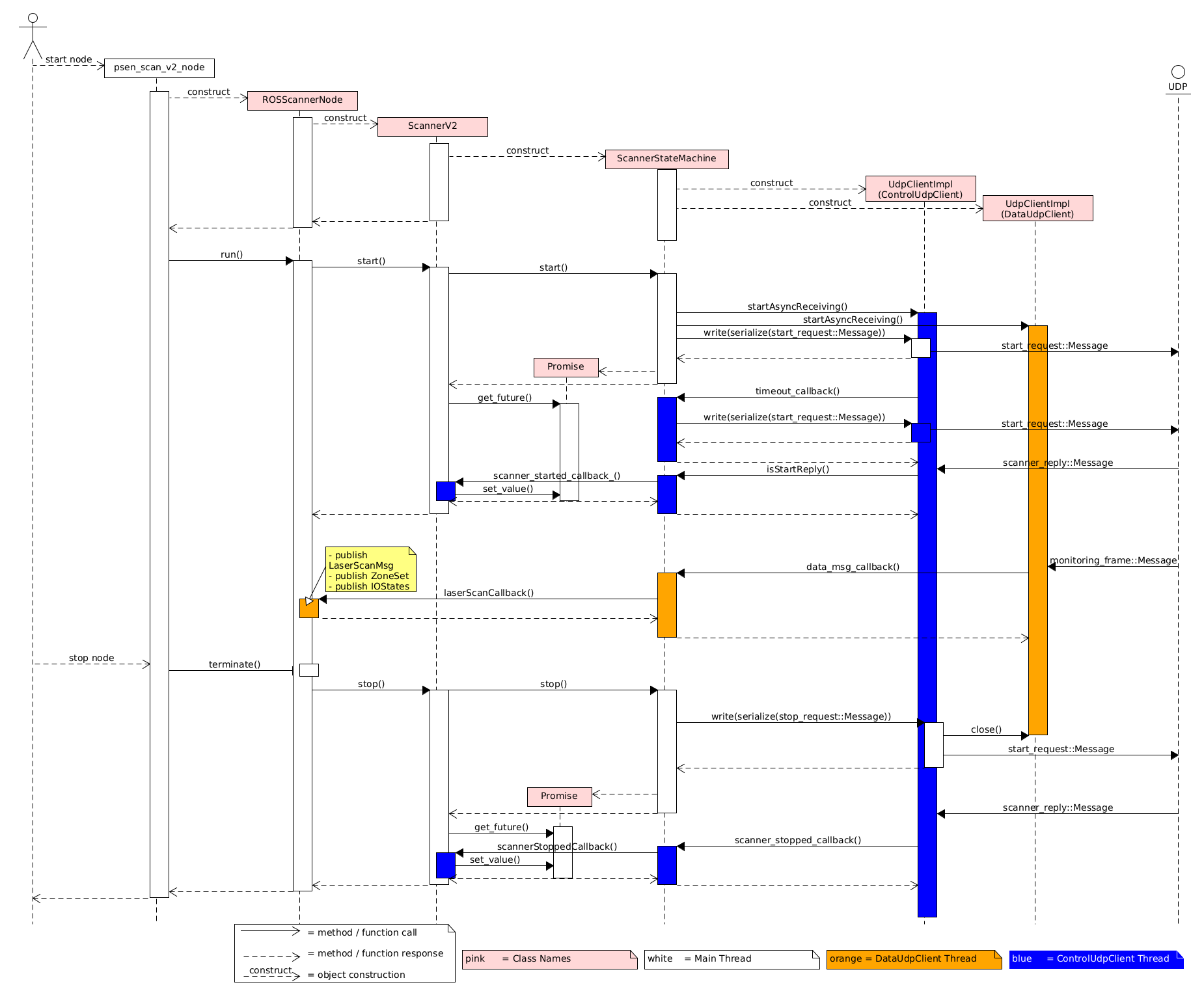
Sequence diagram showing the interaction between the software components