#include <functional>#include <cartesian_control_msgs/FollowCartesianTrajectoryGoal.h>#include <cartesian_control_msgs/FollowCartesianTrajectoryResult.h>#include <cartesian_control_msgs/FollowCartesianTrajectoryFeedback.h>#include <control_msgs/FollowJointTrajectoryGoal.h>#include <control_msgs/FollowJointTrajectoryFeedback.h>#include <vector>#include <hardware_interface/hardware_interface.h>#include <ros/ros.h>
Include dependency graph for trajectory_interface.h:

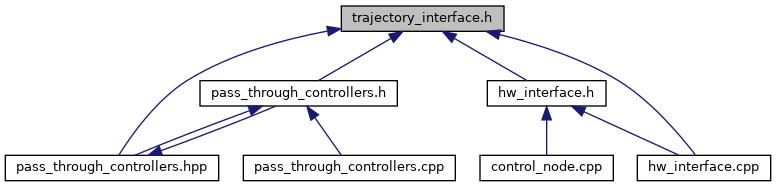
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hardware_interface::TrajectoryInterface< TrajectoryType, FeedbackType > |
| Hardware interface for forwarding trajectories. More... | |
Namespaces | |
| hardware_interface | |
Typedefs | |
| using | hardware_interface::CartesianTrajectory = cartesian_control_msgs::FollowCartesianTrajectoryGoal |
| TrajectoryType for Cartesian trajectories. More... | |
| using | hardware_interface::CartesianTrajectoryFeedback = cartesian_control_msgs::FollowCartesianTrajectoryFeedback |
| FeedbackType for Cartesian trajectories. More... | |
| using | hardware_interface::CartesianTrajectoryInterface = TrajectoryInterface< CartesianTrajectory, CartesianTrajectoryFeedback > |
| Hardware interface for commanding (forwarding) Cartesian trajectories. More... | |
| using | hardware_interface::JointTrajectory = control_msgs::FollowJointTrajectoryGoal |
| TrajectoryType for joint-based trajectories. More... | |
| using | hardware_interface::JointTrajectoryFeedback = control_msgs::FollowJointTrajectoryFeedback |
| FeedbackType for joint-based trajectories. More... | |
| using | hardware_interface::JointTrajectoryInterface = TrajectoryInterface< JointTrajectory, JointTrajectoryFeedback > |
| Hardware interface for commanding (forwarding) joint-based trajectories. More... | |
Enumerations | |
| enum | hardware_interface::ExecutionState { hardware_interface::ExecutionState::SUCCESS = 0, hardware_interface::ExecutionState::PREEMPTED = -1, hardware_interface::ExecutionState::ABORTED = -2 } |
| Hardware-generic done flags for trajectory execution. More... | |
Detailed Description
- Date
- 2020/07/15
Definition in file trajectory_interface.h.