Include dependency graph for geometry/Lanelet.h:
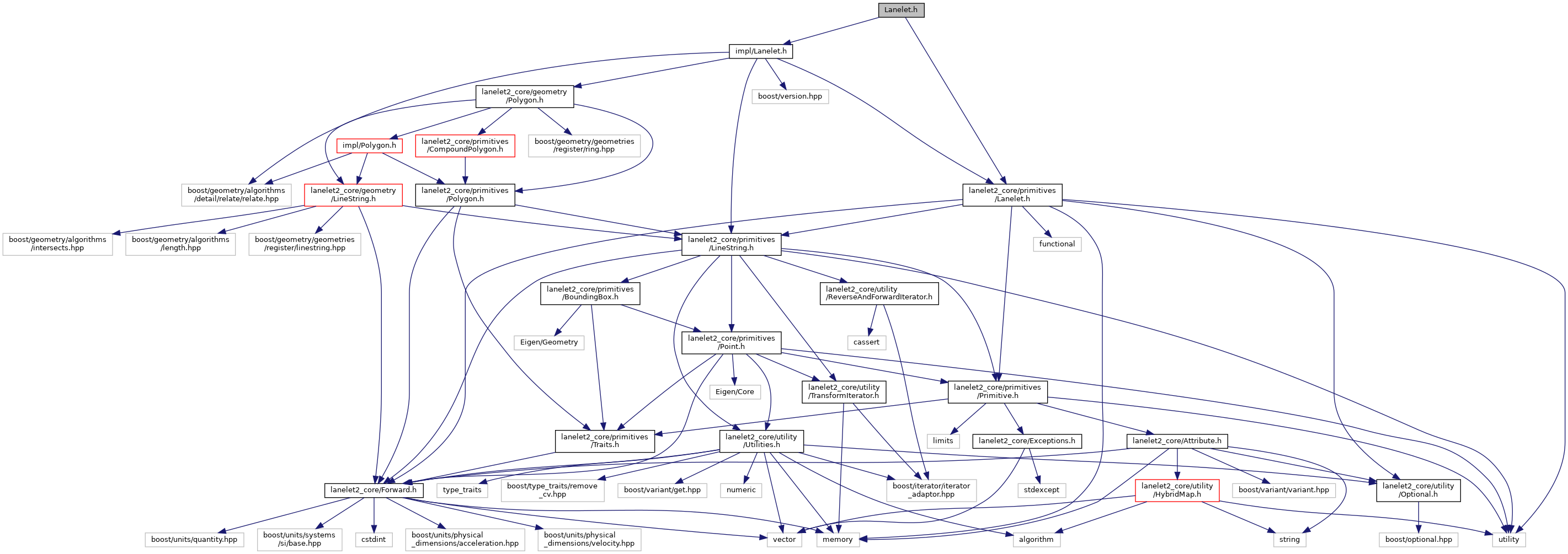
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| lanelet | |
| lanelet::geometry | |
Functions | |
| template<typename LaneletT > | |
| double | lanelet::geometry::approximatedLength2d (const LaneletT &lanelet) |
| approximates length by sampling points along left bound More... | |
| template<typename LaneletT > | |
| IfLL< LaneletT, BoundingBox2d > | lanelet::geometry::boundingBox2d (const LaneletT &lanelet) |
| calculates an up-right 2d bounding box More... | |
| template<typename LaneletT > | |
| IfLL< LaneletT, BoundingBox3d > | lanelet::geometry::boundingBox3d (const LaneletT &lanelet) |
| calculates 3d bounding box More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, IfLL< Lanelet2T, Optional< ConstLineString3d > > > | lanelet::geometry::determineCommonLine (const Lanelet1T &ll, const Lanelet2T &other, bool allowInverted=false) |
| find a common line string in ll and other. More... | |
| template<typename LaneletT > | |
| double | lanelet::geometry::distanceToCenterline2d (const LaneletT &lanelet, const BasicPoint2d &point) |
| calculates distance in 2d to the centerline of a lanelet. More... | |
| template<typename LaneletT > | |
| double | lanelet::geometry::distanceToCenterline3d (const LaneletT &lanelet, const BasicPoint3d &point) |
| calculates distance in 3d to centerline of a lanelet. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, IfLL< Lanelet2T, bool > > | lanelet::geometry::follows (const Lanelet1T &prev, const Lanelet2T &next) |
| checks if a lanelet is the direct successor by checking if they share the same start/endpoints More... | |
| template<typename LaneletT > | |
| IfLL< LaneletT, bool > | lanelet::geometry::inside (const LaneletT &lanelet, const BasicPoint2d &point) |
| Checks whether a point is within or at the border of a lanelet. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| BasicPoints2d | lanelet::geometry::intersectCenterlines2d (const Lanelet1T &lanelet, const Lanelet2T &otherLanelet, std::vector< double > *distanceThis=nullptr, std::vector< double > *distanceOther=nullptr) |
| calculates points of intersection between centerlines in 2d. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, bool > | lanelet::geometry::intersects2d (const Lanelet1T &lanelet, const Lanelet2T &otherLanelet) |
| test whether two lanelets intersect in 2d. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, bool > | lanelet::geometry::intersects3d (const Lanelet1T &lanelet, const Lanelet2T &otherLanelet, double heightTolerance=3.) |
| test whether two lanelets intersect in 2d. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, IfLL< Lanelet2T, bool > > | lanelet::geometry::leftOf (const Lanelet1T &left, const Lanelet2T &right) |
| checks if a lanelet is direcly left of another by checking if they share the same boundary More... | |
| template<typename LaneletT > | |
| double | lanelet::geometry::length2d (const LaneletT &lanelet) |
| calculate length of centerline in 2d More... | |
| template<typename LaneletT > | |
| double | lanelet::geometry::length3d (const LaneletT &lanelet) |
| calculate length of centerline in 3d More... | |
| template<typename LaneletT > | |
| Velocity | lanelet::geometry::maxCurveSpeed (const LaneletT &lanelet, const BasicPoint2d &position, const Acceleration &maxLateralAcceleration=2.0 *units::MPS2()) |
| calculates the maximum velocity without exceding a maximum lateral acceleration. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, bool > | lanelet::geometry::overlaps2d (const Lanelet1T &lanelet, const Lanelet2T &otherLanelet) |
| test whether two lanelets overlap in 2d. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, bool > | lanelet::geometry::overlaps3d (const Lanelet1T &lanelet, const Lanelet2T &otherLanelet, double heightTolerance=3) |
| test whether two lanelets overlap in 3d. More... | |
| template<typename Lanelet1T , typename Lanelet2T > | |
| IfLL< Lanelet1T, IfLL< Lanelet2T, bool > > | lanelet::geometry::rightOf (const Lanelet1T &right, const Lanelet2T &left) |
| checks if a lanelet is direcly right of another by checking if they share the same boundary More... | |