3D Galilean Group SGal(3) state (attitude, position, velocity, time) More...
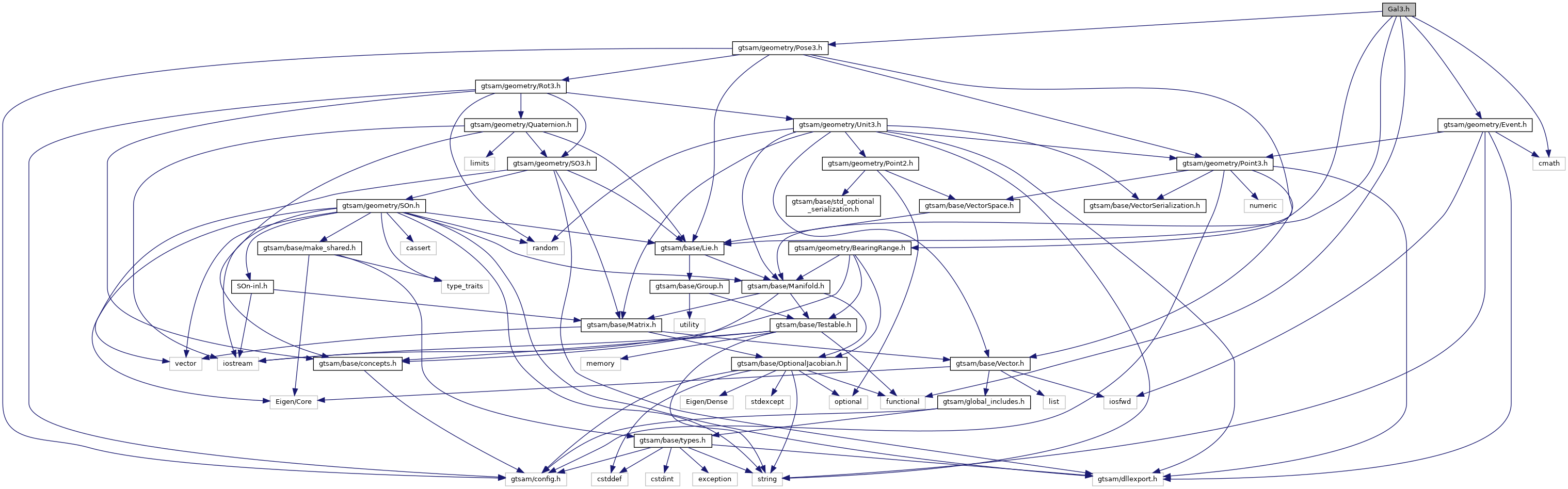
#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Event.h>#include <gtsam/base/Lie.h>#include <gtsam/base/Manifold.h>#include <cmath>#include <functional>
Include dependency graph for Gal3.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | gtsam::Gal3::ChartAtOrigin |
| Chart at origin, uses Expmap/Logmap for Retract/Local. More... | |
| class | gtsam::Gal3 |
| struct | gtsam::traits< const Gal3 > |
| struct | gtsam::traits< Gal3 > |
| Traits specialization for Gal3. More... | |
Namespaces | |
| gtsam | |
| traits | |
Typedefs | |
| using | gtsam::Matrix10 = Eigen::Matrix< double, 10, 10 > |
| using | gtsam::Matrix5 = Eigen::Matrix< double, 5, 5 > |
| using | gtsam::Vector10 = Eigen::Matrix< double, 10, 1 > |
| using | gtsam::Velocity3 = Vector3 |
| Velocity is currently typedef'd to Vector3. More... | |
Detailed Description
3D Galilean Group SGal(3) state (attitude, position, velocity, time)
- Date
- April 30, 2025
Definition in file Gal3.h.