Core components for Attitude-Bias-Calibration systems. More...
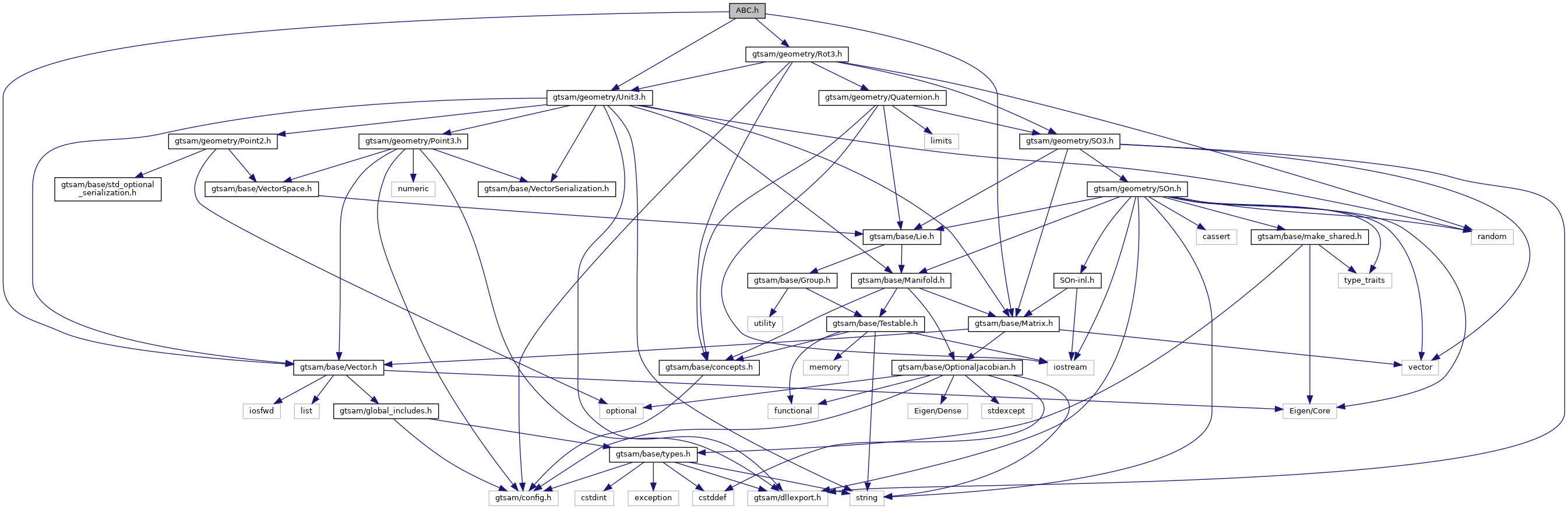
#include <gtsam/base/Matrix.h>#include <gtsam/base/Vector.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/geometry/Unit3.h>
Include dependency graph for ABC.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | gtsam::abc_eqf_lib::G< N > |
| struct | gtsam::abc_eqf_lib::Input |
| Input struct for the Biased Attitude System. More... | |
| struct | gtsam::abc_eqf_lib::Measurement |
| Measurement struct. More... | |
| class | gtsam::abc_eqf_lib::State< N > |
| State class representing the state of the Biased Attitude System. More... | |
| struct | gtsam::traits< abc_eqf_lib::G< N > > |
| struct | gtsam::traits< abc_eqf_lib::State< N > > |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::abc_eqf_lib | |
Functions | |
| Matrix | gtsam::abc_eqf_lib::blockDiag (const Matrix &A, const Matrix &B) |
| Create a block diagonal matrix from two matrices. More... | |
| bool | gtsam::abc_eqf_lib::checkNorm (const Vector3 &x, double tol=1e-3) |
| Check if a vector is a unit vector. More... | |
| bool | gtsam::abc_eqf_lib::hasNaN (const Vector3 &vec) |
| Check if vector contains NaN values. More... | |
| Matrix | gtsam::abc_eqf_lib::repBlock (const Matrix &A, int n) |
| Repeat a block matrix n times along the diagonal. More... | |
Detailed Description
Core components for Attitude-Bias-Calibration systems.
This file contains fundamental components and utilities for the ABC system based on the paper "Overcoming Bias: Equivariant Filter Design for Biased Attitude Estimation with Online Calibration" by Fornasier et al. Authors: Darshan Rajasekaran & Jennifer Oum
Definition in file ABC.h.