#include <cmath>#include <iostream>#include <vector>#include "fcl/config.h"#include "fcl/common/types.h"#include "fcl/math/triangle.h"#include "fcl/math/geometry-inl.h"
Include dependency graph for geometry.h:
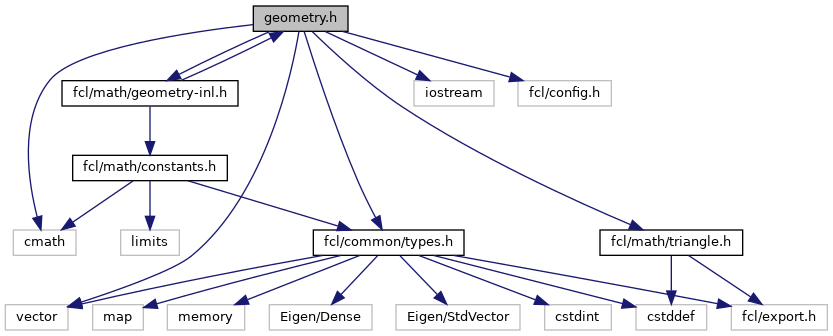
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| fcl | |
| Main namespace. | |
Functions | |
| template<typename S > | |
| FCL_EXPORT void | fcl::axisFromEigen (const Matrix3< S > &eigenV, const Vector3< S > &eigenS, Matrix3< S > &axis) |
| template<typename S > | |
| FCL_EXPORT void | fcl::axisFromEigen (const Matrix3< S > &eigenV, const Vector3< S > &eigenS, Transform3< S > &tf) |
| template<typename S > | |
| FCL_EXPORT void | fcl::circumCircleComputation (const Vector3< S > &a, const Vector3< S > &b, const Vector3< S > &c, Vector3< S > ¢er, S &radius) |
| Compute the center and radius for a triangle's circumcircle. More... | |
| template<typename S , int M, int N> | |
| FCL_EXPORT VectorN< S, M+N > | fcl::combine (const VectorN< S, M > &v1, const VectorN< S, N > &v2) |
| template<typename S > | |
| FCL_EXPORT void | fcl::eigen (const Matrix3< S > &m, Vector3< S > &dout, Matrix3< S > &vout) |
| compute the eigen vector and eigen vector of a matrix. dout is the eigen values, vout is the eigen vectors More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::eigen_old (const Matrix3< S > &m, Vector3< S > &dout, Matrix3< S > &vout) |
| compute the eigen vector and eigen vector of a matrix. dout is the eigen values, vout is the eigen vectors More... | |
| template<typename S > | |
| FCL_EXPORT Matrix3< S > | fcl::generateCoordinateSystem (const Vector3< S > &x_axis) |
| compute orthogonal coordinate system basis with given x-axis. More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::getCovariance (const Vector3< S > *const ps, const Vector3< S > *const ps2, Triangle *ts, unsigned int *indices, int n, Matrix3< S > &M) |
| Compute the covariance matrix for a set or subset of points. if ts = null, then indices refer to points directly; otherwise refer to triangles. More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::getExtentAndCenter (const Vector3< S > *const ps, const Vector3< S > *const ps2, Triangle *ts, unsigned int *indices, int n, const Matrix3< S > &axis, Vector3< S > ¢er, Vector3< S > &extent) |
| Compute the bounding volume extent and center for a set or subset of points, given the BV axises. More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::getExtentAndCenter (const Vector3< S > *const ps, const Vector3< S > *const ps2, Triangle *ts, unsigned int *indices, int n, Transform3< S > &tf, Vector3< S > &extent) |
| Compute the bounding volume extent and center for a set or subset of points, given the BV axises. More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::getRadiusAndOriginAndRectangleSize (const Vector3< S > *const ps, const Vector3< S > *const ps2, Triangle *ts, unsigned int *indices, int n, const Matrix3< S > &axis, Vector3< S > &origin, S l[2], S &r) |
| Compute the RSS bounding volume parameters: radius, rectangle size and the origin, given the BV axises. More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::getRadiusAndOriginAndRectangleSize (const Vector3< S > *const ps, const Vector3< S > *const ps2, Triangle *ts, unsigned int *indices, int n, Transform3< S > &tf, S l[2], S &r) |
| Compute the RSS bounding volume parameters: radius, rectangle size and the origin, given the BV axises. More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::hat (Matrix3< S > &mat, const Vector3< S > &vec) |
| template<typename S > | |
| FCL_EXPORT S | fcl::maximumDistance (const Vector3< S > *const ps, const Vector3< S > *const ps2, Triangle *ts, unsigned int *indices, int n, const Vector3< S > &query) |
| Compute the maximum distance from a given center point to a point cloud. More... | |
| template<typename S > | |
| FCL_EXPORT void | fcl::normalize (Vector3< S > &v, bool *signal) |
| template<typename DerivedA , typename DerivedB , typename DerivedC , typename DerivedD > | |
| FCL_EXPORT void | fcl::relativeTransform (const Eigen::MatrixBase< DerivedA > &R1, const Eigen::MatrixBase< DerivedB > &t1, const Eigen::MatrixBase< DerivedA > &R2, const Eigen::MatrixBase< DerivedB > &t2, Eigen::MatrixBase< DerivedC > &R, Eigen::MatrixBase< DerivedD > &t) |
| template<typename S , typename DerivedA , typename DerivedB > | |
| FCL_EXPORT void | fcl::relativeTransform (const Eigen::Transform< S, 3, Eigen::Isometry > &T1, const Eigen::Transform< S, 3, Eigen::Isometry > &T2, Eigen::MatrixBase< DerivedA > &R, Eigen::MatrixBase< DerivedB > &t) |
| template<typename Derived > | |
| FCL_EXPORT Derived::RealScalar | fcl::triple (const Eigen::MatrixBase< Derived > &x, const Eigen::MatrixBase< Derived > &y, const Eigen::MatrixBase< Derived > &z) |