Useful numerical utilities. More...
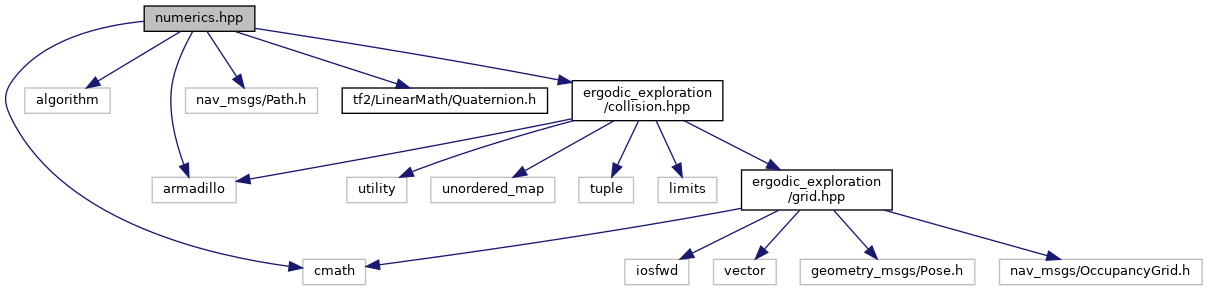
#include <cmath>#include <algorithm>#include <armadillo>#include <nav_msgs/Path.h>#include <tf2/LinearMath/Quaternion.h>#include <ergodic_exploration/collision.hpp>
Include dependency graph for numerics.hpp:
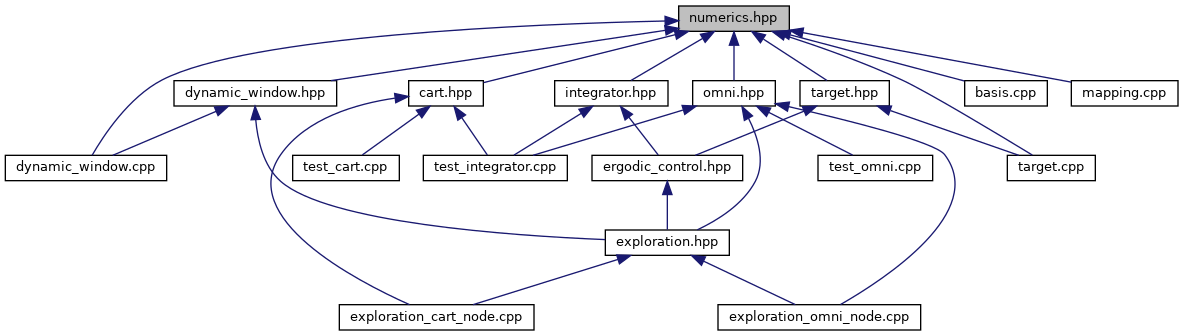
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| ergodic_exploration | |
Functions | |
| bool | ergodic_exploration::almost_equal (double d1, double d2, double epsilon=1.0e-12) |
| approximately compare two floating-point numbers More... | |
| nav_msgs::Path | ergodic_exploration::constTwistPath (const std::string &map_frame_id, const vec &x0, const vec &u, double dt, double horizon) |
| Visualize path from following a constant twist. More... | |
| double | ergodic_exploration::distance (double x0, double y0, double x1, double y1) |
| Euclidean distance between two points. More... | |
| double | ergodic_exploration::entropy (double p) |
| Entropy of a single grid cell. More... | |
| double | ergodic_exploration::getYaw (double qx, double qy, double qz, double qw) |
| Get yaw from quaternion. More... | |
| vec | ergodic_exploration::integrate_twist (const vec &x, const vec &u, double dt) |
| Integrate a constant twist. More... | |
| double | ergodic_exploration::normalize_angle_2PI (double rad) |
| Wraps angle between 0 and 2pi or 0 to -2pi. More... | |
| double | ergodic_exploration::normalize_angle_PI (double rad) |
| Wraps angle between -pi and pi. More... | |
| vec | ergodic_exploration::polar2Cartesian (double angle, double range) |
| Convert polar to cartesian coordinates. More... | |
| vec | ergodic_exploration::polar2CartesianHomo (double angle, double range) |
| Convert polar to cartesian homogenous coordinates. More... | |
| mat | ergodic_exploration::transform2d (double angle) |
| Construct 2D transformation. More... | |
| mat | ergodic_exploration::transform2d (double x, double y) |
| Construct 2D transformation matrix. More... | |
| mat | ergodic_exploration::transform2d (double x, double y, double angle) |
| Construct 2D transformation matrix. More... | |
| mat | ergodic_exploration::transform2dInv (const mat &trans2d) |
| Construct 2D transformation inverse. More... | |
| bool | ergodic_exploration::validate_control (const Collision &collision, const GridMap &grid, const vec &x0, const vec &u, double dt, double horizon) |
| Determine if control will cause a collision. More... | |
Variables | |
| constexpr double | ergodic_exploration::PI = 3.14159265358979323846 |