Ergodic exploration with a user defined target and dynamic window approach for collision avoidance. More...
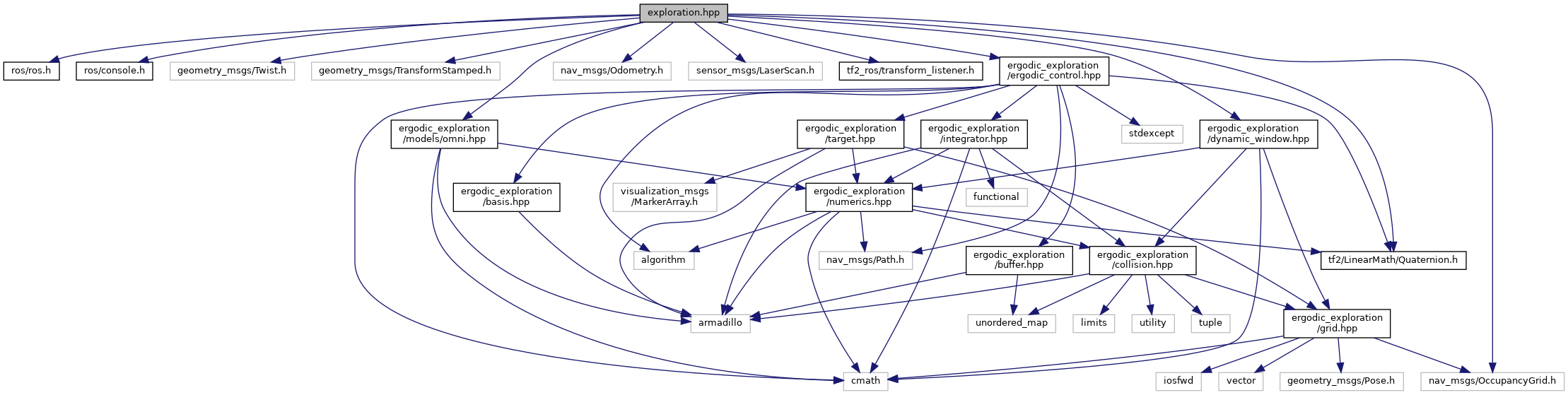
#include <ros/ros.h>#include <ros/console.h>#include <geometry_msgs/Twist.h>#include <geometry_msgs/TransformStamped.h>#include <nav_msgs/OccupancyGrid.h>#include <nav_msgs/Odometry.h>#include <sensor_msgs/LaserScan.h>#include <tf2_ros/transform_listener.h>#include <tf2/LinearMath/Quaternion.h>#include <ergodic_exploration/ergodic_control.hpp>#include <ergodic_exploration/dynamic_window.hpp>#include <ergodic_exploration/models/omni.hpp>
Include dependency graph for exploration.hpp:
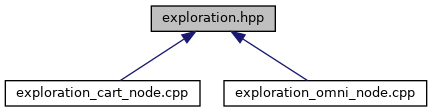
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ergodic_exploration::Exploration< ModelT > |
| Exploration template. More... | |
Namespaces | |
| ergodic_exploration | |
Variables | |
| constexpr char | ergodic_exploration::LOGNAME [] = "ergodic exploration" |
Detailed Description
Ergodic exploration with a user defined target and dynamic window approach for collision avoidance.
- Date
- 4 Dec 2020
Definition in file exploration.hpp.