Kinematic cart models control wheel velocities or body twist. More...
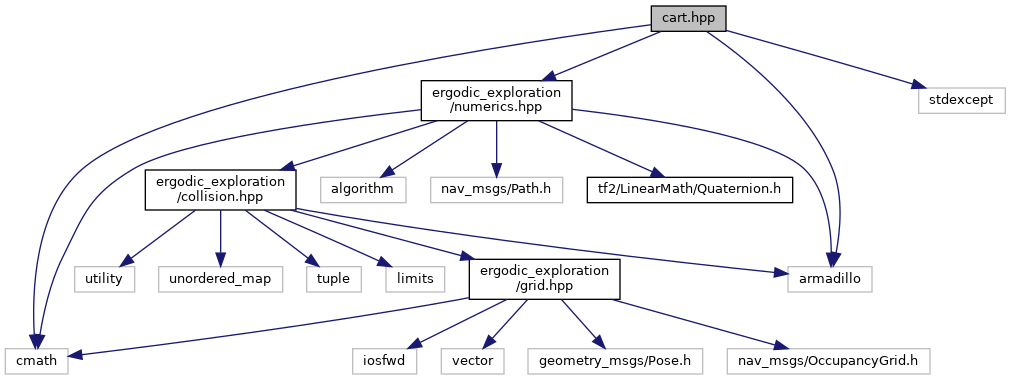
#include <cmath>#include <stdexcept>#include <armadillo>#include <ergodic_exploration/numerics.hpp>
Include dependency graph for cart.hpp:
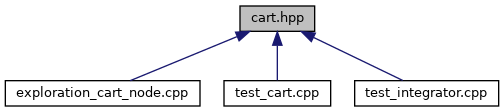
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | ergodic_exploration::models::Cart |
| Kinematic model of 2 wheel differential drive robot. More... | |
| struct | ergodic_exploration::models::SimpleCart |
| Kinematic model of a wheeled differential drive robot. More... | |
Namespaces | |
| ergodic_exploration | |
| ergodic_exploration::models | |
Detailed Description
Kinematic cart models control wheel velocities or body twist.
- Date
- 28 Oct 2020
Definition in file cart.hpp.