#include <vector>
#include <string>
#include <map>
#include <yaml-cpp/yaml.h>
#include <memory>
#include <iostream>
#include <end_effector/Utils.h>
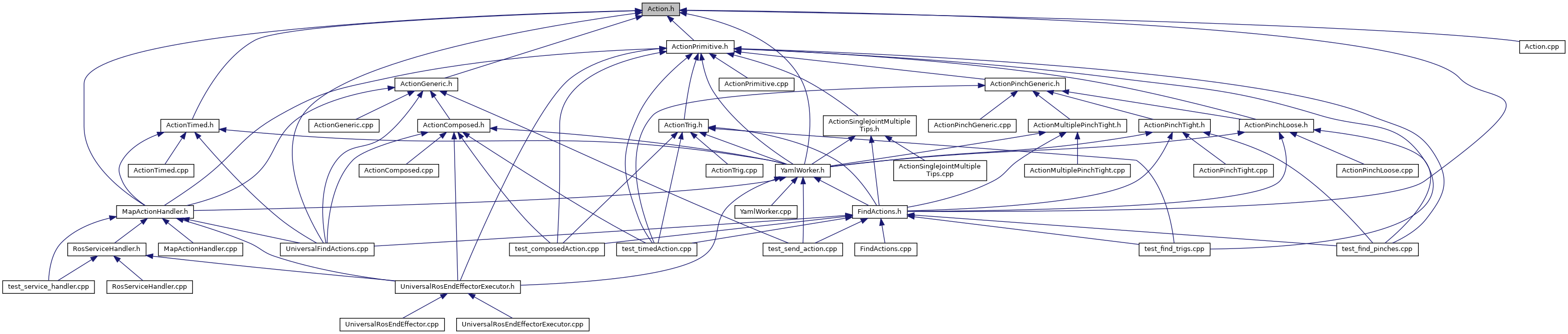
Go to the source code of this file.
|
| class | ROSEE::Action |
| | The pure virtual class representing an Action. It has members that are in common to all derived class. More...
|
| |
|
| typedef std::map< std::string, std::vector< double > > | ROSEE::JointPos |
| | The map to describe the position of all actuated joints. The key is the name of the string, the value is a vector of joint positions (because in general a joint can have more DOFs. More...
|
| |
| typedef std::map< std::string, unsigned int > | ROSEE::JointsInvolvedCount |
| | The map to describe, how many times a joint is set by the action. An ActionPrimitive and an ActionComposed (indipendent) have as values only 0 or 1. ActionComposed (not independet) can have values > 1. This map is also useful to understand if a joint is used or not by the action (0 == not used) so we can control only the necessary joints. More...
|
| |