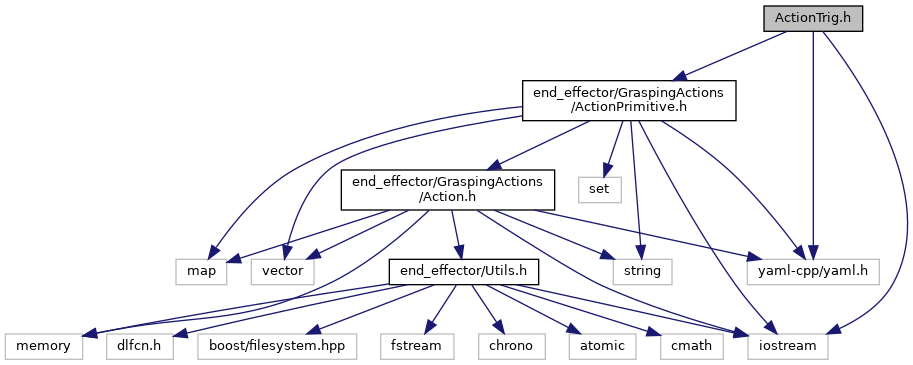
#include <end_effector/GraspingActions/ActionPrimitive.h>#include <yaml-cpp/yaml.h>#include <iostream>
Include dependency graph for ActionTrig.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | ROSEE::ActionTrig |
| The action of moving some joints (see later) of a single finger in a full clousure position towards the palm. The action is unique (joints involved in a certain position: the bound) so maxStoredActionStates == 1 always Described by: More... | |
Namespaces | |
| ROSEE | |