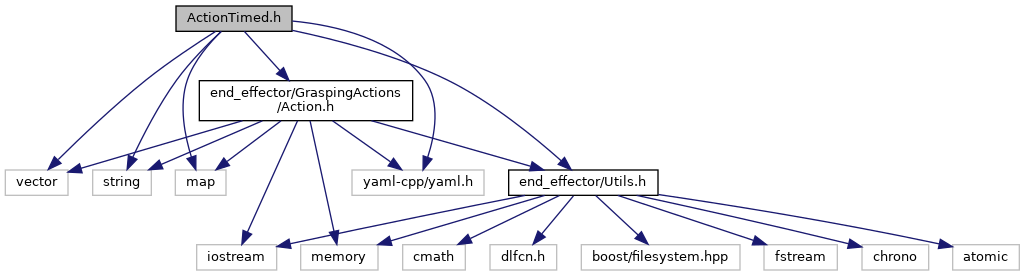
#include <vector>#include <string>#include <map>#include <end_effector/GraspingActions/Action.h>#include <end_effector/Utils.h>#include <yaml-cpp/yaml.h>
Include dependency graph for ActionTimed.h:
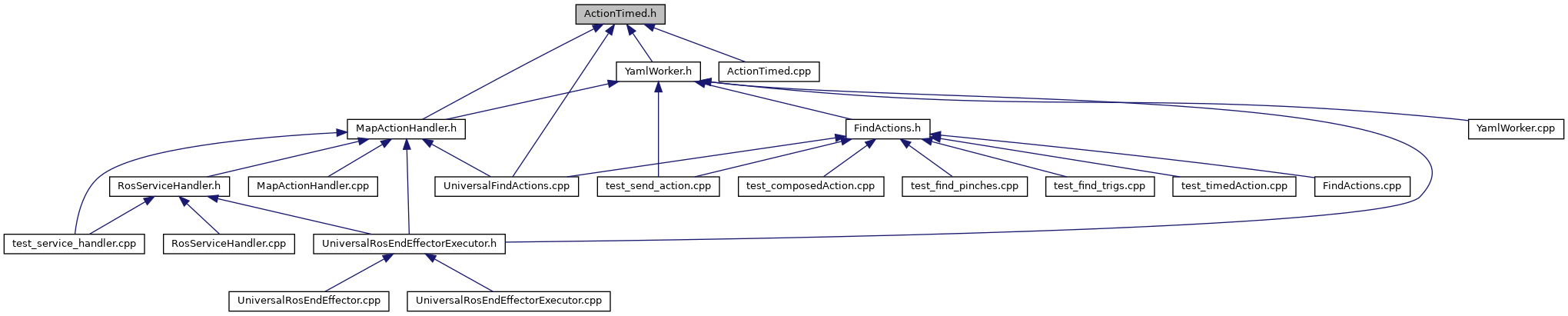
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSEE::ActionTimed |
| An action composed by other ones that must be executed one after other with some wait time (also 0) in between. E.G. 0.000000second --—> Grasp --—> 0.1 + 0.1 second --—> OpenLid --—> 0.5second -— and so on This class contains all the joint position of each action (actionsJointPosMap ) and some time margins which indicates wait time before and after the action (actionsTimeMarginsMap). Each action inside is identified by its name, so no two action with same name can exist (see insertAction ) After create the ActionTimed object, we can add actions with insertAction(). As all other Action classes, it implements also functions to emit and parse in a yaml file. More... | |
Namespaces | |
| ROSEE | |