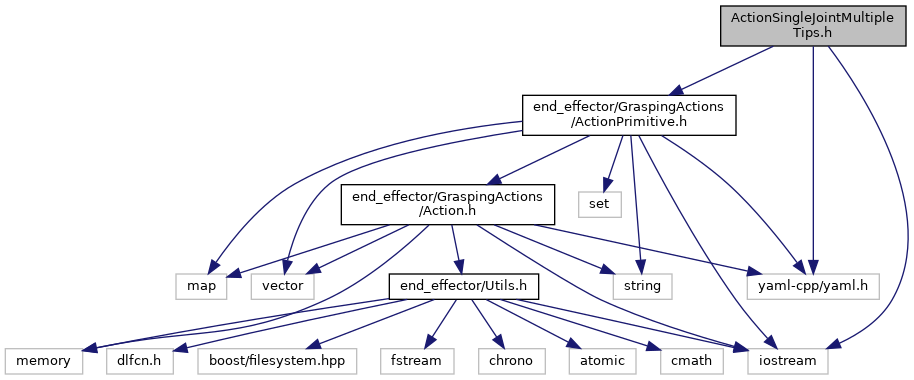
#include <end_effector/GraspingActions/ActionPrimitive.h>#include <yaml-cpp/yaml.h>#include <iostream>
Include dependency graph for ActionSingleJointMultipleTips.h:
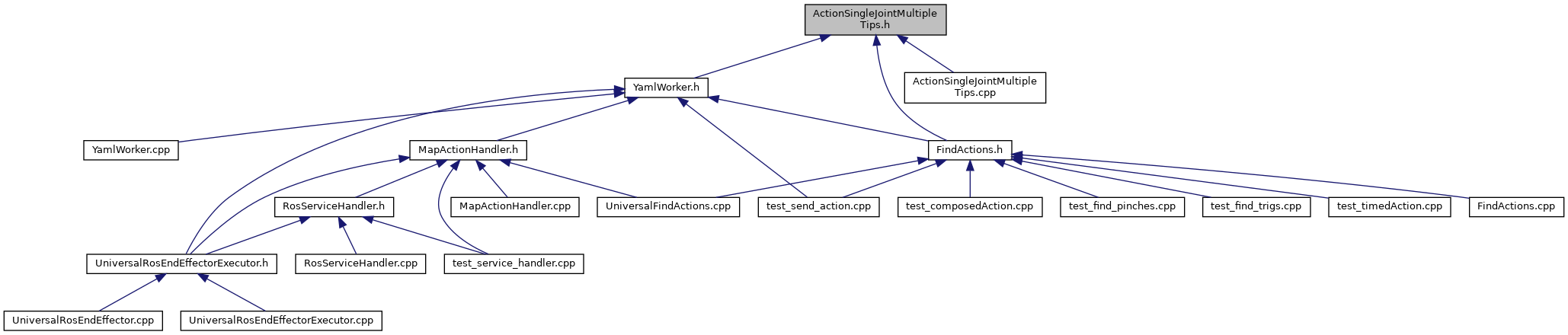
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSEE::ActionSingleJointMultipleTips |
| Primitive which indicate a motion of n fingers moving ONLY ONE joint. For example, this primitive is necessary for the hands that have one joint that close all the fingers to do a grasp. But it can also useful to detect other multiple finger motions (like a "spread finger") More... | |
Namespaces | |
| ROSEE | |