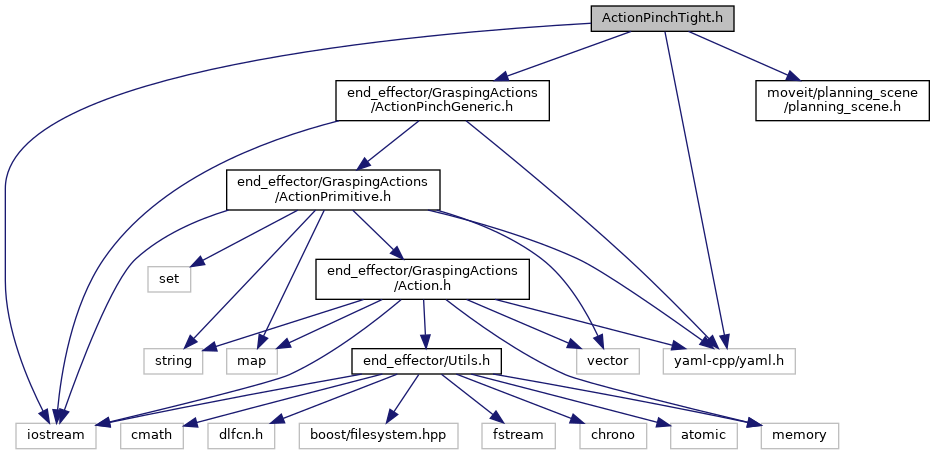
#include <end_effector/GraspingActions/ActionPinchGeneric.h>#include <moveit/planning_scene/planning_scene.h>#include <yaml-cpp/yaml.h>#include <iostream>
Include dependency graph for ActionPinchTight.h:
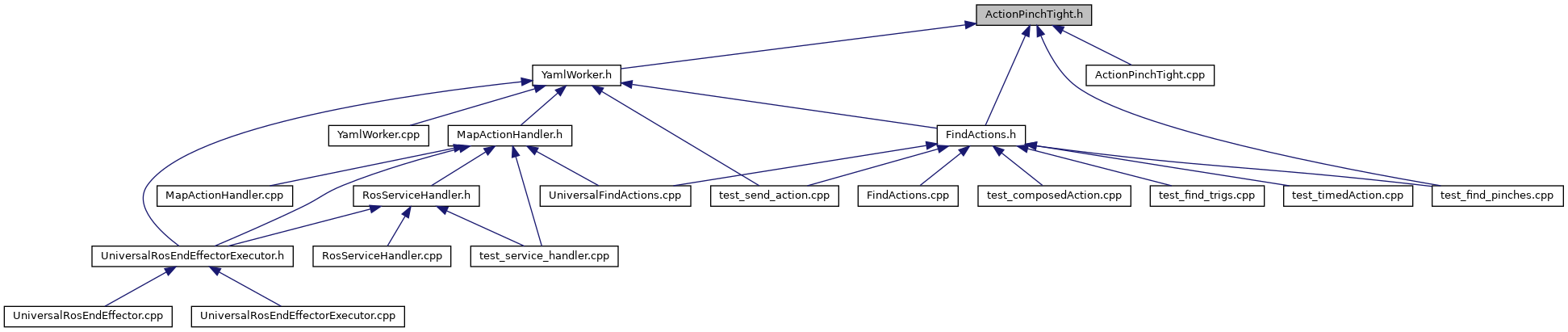
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSEE::ActionPinchTight |
| The action of pinch with two tips. The two tips must collide for some hand configuration to mark this configuration as a pinchTight. All the non involved fingers are set in the default state. A pinchTight is defined by: More... | |
| struct | ROSEE::ActionPinchTight::depthComp |
| struct to put in order the actionStates. The first elements are the ones with greater depth @FIX, even if is almost impossible, two different contact with same depth will be considered equal with this definition of depthComp. Theoretically they are equal only if the joint status are equal (of only joints that act for the collision). In fact, we should have the possibility to have two contact with the same depth (if joint statuses are different), they will be equally good More... | |
Namespaces | |
| ROSEE | |