Implementation of a simple reducer transmission. More...
#include <simple_transmission.h>
Public Member Functions | |
| void | actuatorToJointAbsolutePosition (const ActuatorData &act_data, JointData &jnt_data) override |
| void | actuatorToJointEffort (const ActuatorData &act_data, JointData &jnt_data) override |
| Transform effort variables from actuator to joint space. More... | |
| void | actuatorToJointPosition (const ActuatorData &act_data, JointData &jnt_data) override |
| Transform position variables from actuator to joint space. More... | |
| void | actuatorToJointTorqueSensor (const ActuatorData &act_data, JointData &jnt_data) override |
| void | actuatorToJointVelocity (const ActuatorData &act_data, JointData &jnt_data) override |
| Transform velocity variables from actuator to joint space. More... | |
| double | getActuatorReduction () const |
| double | getJointOffset () const |
| bool | hasActuatorToJointAbsolutePosition () const override |
| bool | hasActuatorToJointTorqueSensor () const override |
| void | jointToActuatorEffort (const JointData &jnt_data, ActuatorData &act_data) override |
| Transform effort variables from joint to actuator space. More... | |
| void | jointToActuatorPosition (const JointData &jnt_data, ActuatorData &act_data) override |
| Transform position variables from joint to actuator space. More... | |
| void | jointToActuatorVelocity (const JointData &jnt_data, ActuatorData &act_data) override |
| Transform velocity variables from joint to actuator space. More... | |
| std::size_t | numActuators () const override |
| std::size_t | numJoints () const override |
| SimpleTransmission (const double reduction, const double joint_offset=0.0) | |
 Public Member Functions inherited from transmission_interface::Transmission Public Member Functions inherited from transmission_interface::Transmission | |
| virtual | ~Transmission ()=default |
Private Attributes | |
| double | jnt_offset_ |
| double | reduction_ |
Detailed Description
Implementation of a simple reducer transmission.
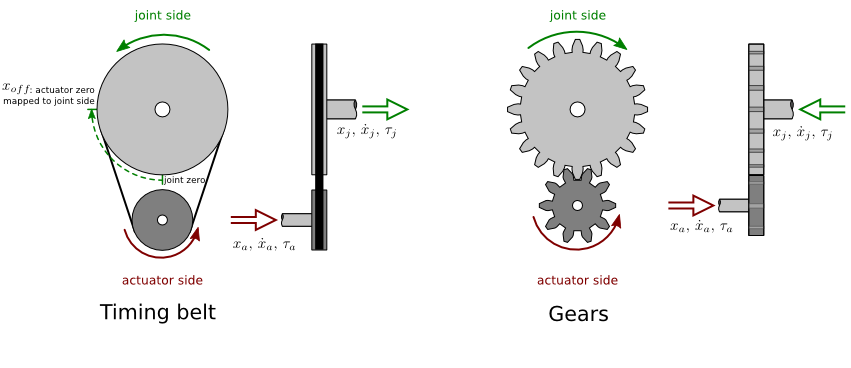
This transmission relates one actuator and one joint through a reductor (or amplifier). Timing belts and gears are examples of this transmission type, and are illustrated below.
| Actuator to joint |
|
|
|
| Joint to actuator |
|
|
|
![\[ \tau_j = n \tau_a \]](form_20.png)
![\[ \dot{x}_j = \dot{x}_a / n \]](form_21.png)
![\[ x_j = x_a / n + x_{off} \]](form_22.png)
![\[ \tau_a = \tau_j / n\]](form_23.png)
![\[ \dot{x}_a = n \dot{x}_j \]](form_24.png)
![\[ x_a = n (x_j - x_{off}) \]](form_25.png)
where:
 ,
,  and
and  are position, velocity and effort variables, respectively.
are position, velocity and effort variables, respectively.- Subindices
 and
and  are used to represent actuator-space and joint-space variables, respectively.
are used to represent actuator-space and joint-space variables, respectively.  represents the offset between motor and joint zeros, expressed in joint position coordinates.
represents the offset between motor and joint zeros, expressed in joint position coordinates. is the transmission ratio, and can be computed as the ratio between the output and input pulley radii for the timing belt; or the ratio between output and input teeth for the gear system. The transmission ratio can take any real value except zero. In particular:
is the transmission ratio, and can be computed as the ratio between the output and input pulley radii for the timing belt; or the ratio between output and input teeth for the gear system. The transmission ratio can take any real value except zero. In particular:- If its absolute value is greater than one, it's a velocity reducer / effort amplifier, while if its absolute value lies in
 it's a velocity amplifier / effort reducer.
it's a velocity amplifier / effort reducer. - Negative values represent a direction flip, ie. actuator and joint move in opposite directions. For example, in timing belts actuator and joint move in the same direction, while in single-stage gear systems actuator and joint move in opposite directions.
- If its absolute value is greater than one, it's a velocity reducer / effort amplifier, while if its absolute value lies in
Definition at line 95 of file simple_transmission.h.
Constructor & Destructor Documentation
◆ SimpleTransmission()
|
inline |
- Parameters
-
reduction Reduction ratio. joint_offset Joint position offset used in the position mappings.
- Precondition
- Nonzero reduction value.
Definition at line 186 of file simple_transmission.h.
Member Function Documentation
◆ actuatorToJointAbsolutePosition()
|
inlineoverridevirtual |
Reimplemented from transmission_interface::Transmission.
Definition at line 224 of file simple_transmission.h.
◆ actuatorToJointEffort()
|
inlineoverridevirtual |
Transform effort variables from actuator to joint space.
- Parameters
-
[in] act_data Actuator-space variables. [out] jnt_data Joint-space variables.
- Precondition
- Actuator and joint effort vectors must have size 1 and point to valid data. To call this method it is not required that all other data vectors contain valid data, and can even remain empty.
Implements transmission_interface::Transmission.
Definition at line 197 of file simple_transmission.h.
◆ actuatorToJointPosition()
|
inlineoverridevirtual |
Transform position variables from actuator to joint space.
- Parameters
-
[in] act_data Actuator-space variables. [out] jnt_data Joint-space variables.
- Precondition
- Actuator and joint position vectors must have size 1 and point to valid data. To call this method it is not required that all other data vectors contain valid data, and can even remain empty.
Implements transmission_interface::Transmission.
Definition at line 215 of file simple_transmission.h.
◆ actuatorToJointTorqueSensor()
|
inlineoverridevirtual |
Reimplemented from transmission_interface::Transmission.
Definition at line 234 of file simple_transmission.h.
◆ actuatorToJointVelocity()
|
inlineoverridevirtual |
Transform velocity variables from actuator to joint space.
- Parameters
-
[in] act_data Actuator-space variables. [out] jnt_data Joint-space variables.
- Precondition
- Actuator and joint velocity vectors must have size 1 and point to valid data. To call this method it is not required that all other data vectors contain valid data, and can even remain empty.
Implements transmission_interface::Transmission.
Definition at line 206 of file simple_transmission.h.
◆ getActuatorReduction()
|
inline |
Definition at line 177 of file simple_transmission.h.
◆ getJointOffset()
|
inline |
Definition at line 178 of file simple_transmission.h.
◆ hasActuatorToJointAbsolutePosition()
|
inlineoverridevirtual |
Reimplemented from transmission_interface::Transmission.
Definition at line 174 of file simple_transmission.h.
◆ hasActuatorToJointTorqueSensor()
|
inlineoverridevirtual |
Reimplemented from transmission_interface::Transmission.
Definition at line 175 of file simple_transmission.h.
◆ jointToActuatorEffort()
|
inlineoverridevirtual |
Transform effort variables from joint to actuator space.
- Parameters
-
[in] jnt_data Joint-space variables. [out] act_data Actuator-space variables.
- Precondition
- Actuator and joint effort vectors must have size 1 and point to valid data. To call this method it is not required that all other data vectors contain valid data, and can even remain empty.
Implements transmission_interface::Transmission.
Definition at line 245 of file simple_transmission.h.
◆ jointToActuatorPosition()
|
inlineoverridevirtual |
Transform position variables from joint to actuator space.
- Parameters
-
[in] jnt_data Joint-space variables. [out] act_data Actuator-space variables.
- Precondition
- Actuator and joint position vectors must have size 1 and point to valid data. To call this method it is not required that all other data vectors contain valid data, and can even remain empty.
Implements transmission_interface::Transmission.
Definition at line 263 of file simple_transmission.h.
◆ jointToActuatorVelocity()
|
inlineoverridevirtual |
Transform velocity variables from joint to actuator space.
- Parameters
-
[in] jnt_data Joint-space variables. [out] act_data Actuator-space variables.
- Precondition
- Actuator and joint velocity vectors must have size 1 and point to valid data. To call this method it is not required that all other data vectors contain valid data, and can even remain empty.
Implements transmission_interface::Transmission.
Definition at line 254 of file simple_transmission.h.
◆ numActuators()
|
inlineoverridevirtual |
- Returns
- Number of actuators managed by transmission, ie. the dimension of the actuator space.
Implements transmission_interface::Transmission.
Definition at line 172 of file simple_transmission.h.
◆ numJoints()
|
inlineoverridevirtual |
- Returns
- Number of joints managed by transmission, ie. the dimension of the joint space.
Implements transmission_interface::Transmission.
Definition at line 173 of file simple_transmission.h.
Member Data Documentation
◆ jnt_offset_
|
private |
Definition at line 183 of file simple_transmission.h.
◆ reduction_
|
private |
Definition at line 182 of file simple_transmission.h.
The documentation for this class was generated from the following file: