Compute an effort demand from the effort error. As the effort PID loop is running on the motor boards, there's no PID loops involved here. We're just using the friction compensation algorithm to take into account the friction of the tendons. More...
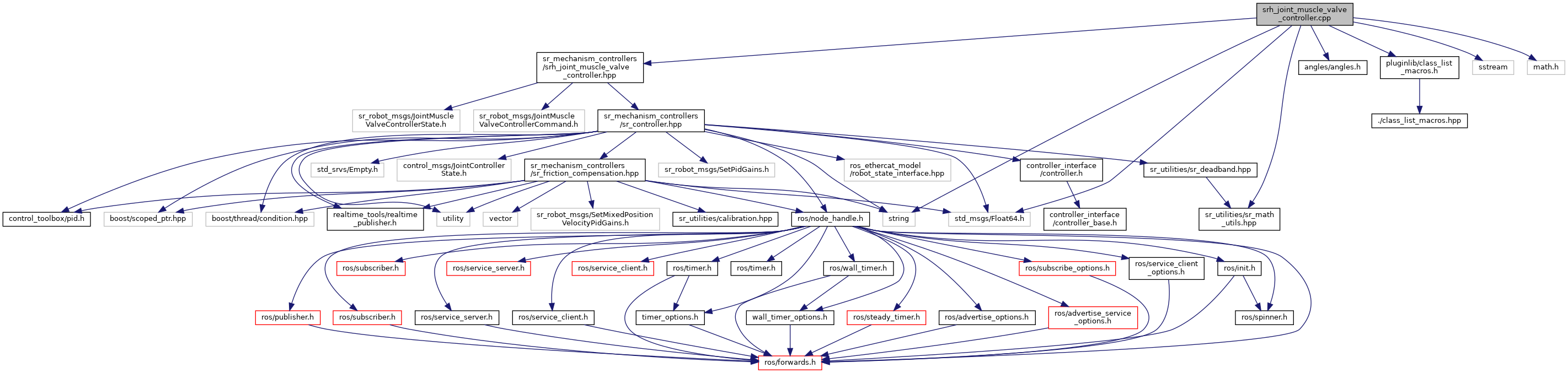
#include "sr_mechanism_controllers/srh_joint_muscle_valve_controller.hpp"#include "angles/angles.h"#include "pluginlib/class_list_macros.h"#include <string>#include <sstream>#include <math.h>#include "sr_utilities/sr_math_utils.hpp"#include <std_msgs/Float64.h>
Include dependency graph for srh_joint_muscle_valve_controller.cpp:
Go to the source code of this file.
Namespaces | |
| controller | |
Detailed Description
Compute an effort demand from the effort error. As the effort PID loop is running on the motor boards, there's no PID loops involved here. We're just using the friction compensation algorithm to take into account the friction of the tendons.
- Date
- Wed Aug 17 12:32:01 2011
Definition in file srh_joint_muscle_valve_controller.cpp.