The goal of this ROS publisher is to publish relevant data concerning the hand at a regular time interval. Those data are (not exhaustive): positions, targets, temperatures, currents, forces, error flags, ... More...
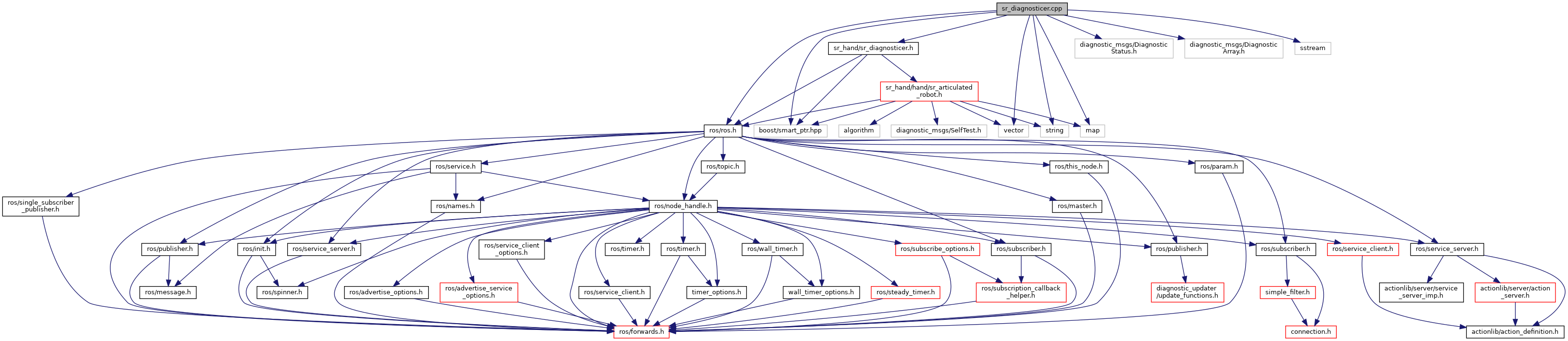
#include <ros/ros.h>#include <diagnostic_msgs/DiagnosticStatus.h>#include <diagnostic_msgs/DiagnosticArray.h>#include <vector>#include <string>#include <map>#include <sstream>#include <boost/smart_ptr.hpp>#include "sr_hand/sr_diagnosticer.h"
Include dependency graph for sr_diagnosticer.cpp:
Go to the source code of this file.
Namespaces | |
| shadowrobot | |
Detailed Description
The goal of this ROS publisher is to publish relevant data concerning the hand at a regular time interval. Those data are (not exhaustive): positions, targets, temperatures, currents, forces, error flags, ...
- Date
- Thu Mar 25 15:36:41 2010
Definition in file sr_diagnosticer.cpp.