The real arm can be used as a simulator. It modelizes the Shadow Robot muscle arm. More...
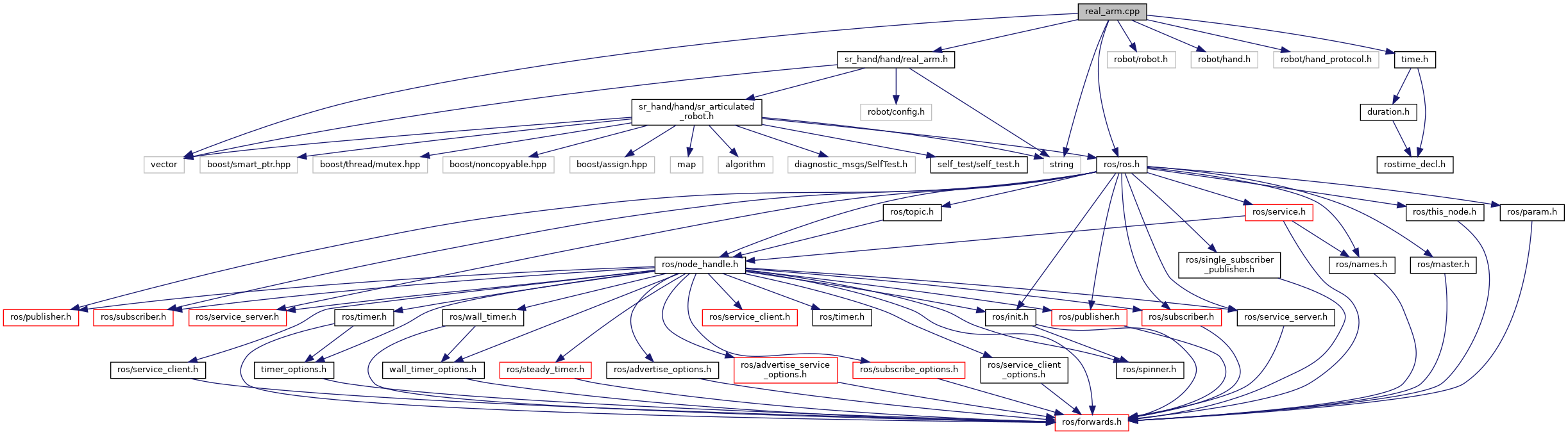
#include "sr_hand/hand/real_arm.h"#include <robot/robot.h>#include <robot/hand.h>#include <robot/hand_protocol.h>#include <string>#include <vector>#include <time.h>#include <ros/ros.h>
Include dependency graph for real_arm.cpp:
Go to the source code of this file.
Namespaces | |
| shadowrobot | |
Detailed Description
The real arm can be used as a simulator. It modelizes the Shadow Robot muscle arm.
- Date
- Tue Jun 29 14:56:10 2010
Definition in file real_arm.cpp.