#include "ros/forwards.h"#include "ros/publisher.h"#include "ros/subscriber.h"#include "ros/service_server.h"#include "ros/service_client.h"#include "ros/timer.h"#include "ros/rate.h"#include "ros/wall_timer.h"#include "ros/steady_timer.h"#include "ros/advertise_options.h"#include "ros/advertise_service_options.h"#include "ros/subscribe_options.h"#include "ros/service_client_options.h"#include "ros/timer_options.h"#include "ros/wall_timer_options.h"#include "ros/spinner.h"#include "ros/init.h"#include "common.h"#include <boost/bind.hpp>#include <xmlrpcpp/XmlRpcValue.h>
Include dependency graph for node_handle.h:

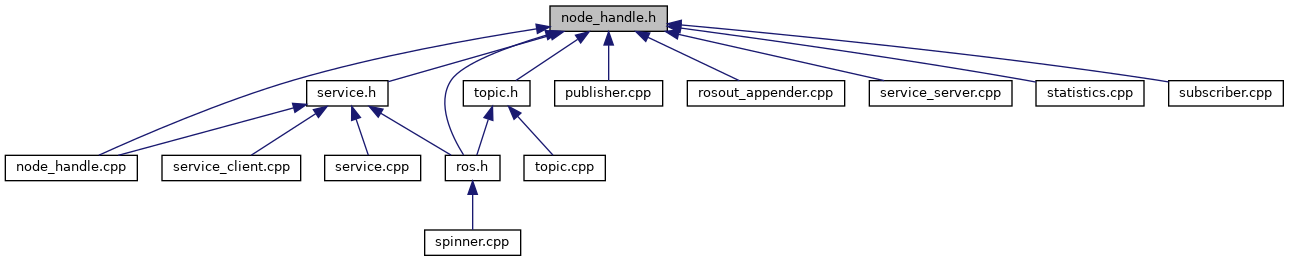
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | ros::NodeHandle::no_validate |
| class | ros::NodeHandle |
| roscpp's interface for creating subscribers, publishers, etc. More... | |
Namespaces | |
| ros | |