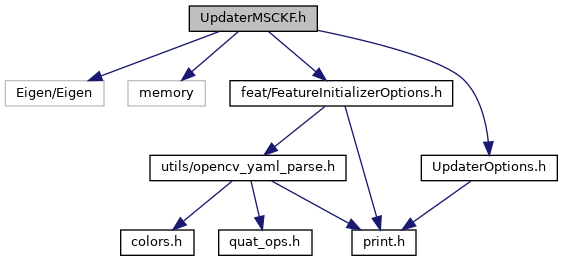
#include <Eigen/Eigen>#include <memory>#include "feat/FeatureInitializerOptions.h"#include "UpdaterOptions.h"
Include dependency graph for UpdaterMSCKF.h:
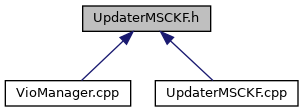
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ov_msckf::UpdaterMSCKF |
| Will compute the system for our sparse features and update the filter. More... | |
Namespaces | |
| ov_core | |
| ov_msckf | |
| Extended Kalman Filter estimator. | |