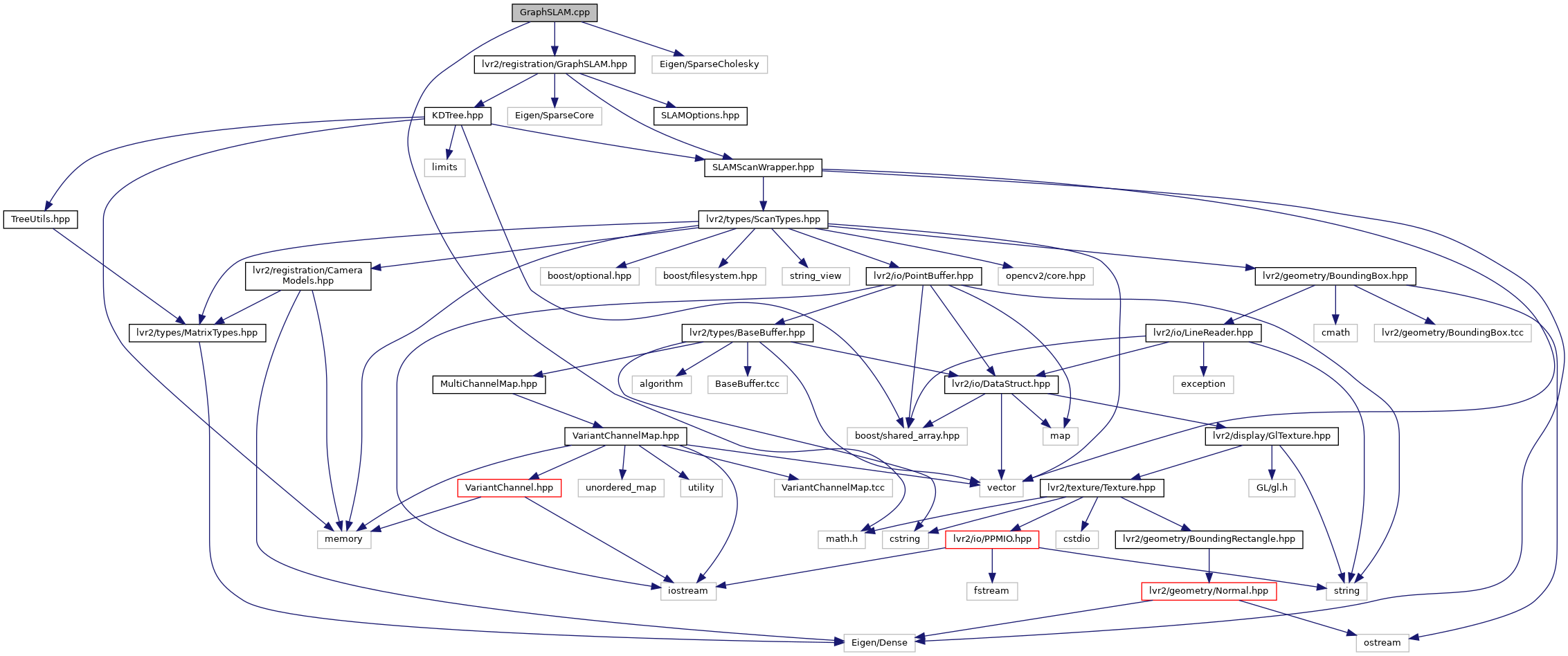
Include dependency graph for GraphSLAM.cpp:
Go to the source code of this file.
Namespaces | |
| lvr2 | |
Functions | |
| void | lvr2::EulerToMatrix4 (const Vector3d &pos, const Vector3d &theta, Matrix4d &mat) |
| Conversion from Pose to Matrix representation. More... | |
| bool | lvr2::findCloseScans (const vector< SLAMScanPtr > &scans, size_t scan, const SLAMOptions &options, vector< size_t > &output) |
| Lists all numbers of scans near to the scan. More... | |
| void | lvr2::Matrix4ToEuler (const Matrix4d mat, Vector3d &rPosTheta, Vector3d &rPos) |
| Conversion from Matrix to Pose representation. More... | |