Data structure for dealing with Structure from Motion data. More...
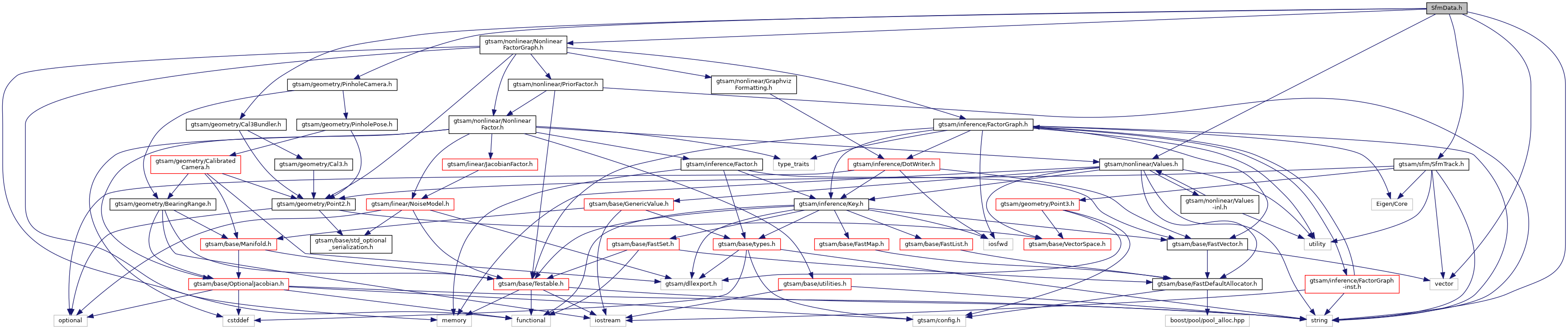
#include <gtsam/geometry/Cal3Bundler.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/sfm/SfmTrack.h>#include <string>#include <vector>
Include dependency graph for SfmData.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | gtsam::SfmData |
| SfmData stores a bunch of SfmTracks. More... | |
| struct | gtsam::traits< SfmData > |
| traits More... | |
Namespaces | |
| gtsam | |
| traits | |
Typedefs | |
| typedef PinholeCamera< Cal3Bundler > | gtsam::SfmCamera |
| Define the structure for the camera poses. More... | |
Functions | |
| Pose3 | gtsam::gtsam2openGL (const Rot3 &R, double tx, double ty, double tz) |
| This function converts a GTSAM camera pose to an openGL camera pose. More... | |
| Pose3 | gtsam::gtsam2openGL (const Pose3 &PoseGTSAM) |
| This function converts a GTSAM camera pose to an openGL camera pose. More... | |
| Values | gtsam::initialCamerasAndPointsEstimate (const SfmData &db) |
| This function creates initial values for cameras and points from db. More... | |
| Values | gtsam::initialCamerasEstimate (const SfmData &db) |
| This function creates initial values for cameras from db. More... | |
| Pose3 | gtsam::openGL2gtsam (const Rot3 &R, double tx, double ty, double tz) |
| This function converts an openGL camera pose to an GTSAM camera pose. More... | |
| SfmData | gtsam::readBal (const std::string &filename) |
| This function parses a "Bundle Adjustment in the Large" (BAL) file and returns the data as a SfmData structure. Mainly used by wrapped code. More... | |
| bool | gtsam::writeBAL (const std::string &filename, const SfmData &data) |
| This function writes a "Bundle Adjustment in the Large" (BAL) file from a SfmData structure. More... | |
| bool | gtsam::writeBALfromValues (const std::string &filename, const SfmData &data, const Values &values) |
| This function writes a "Bundle Adjustment in the Large" (BAL) file from a SfmData structure and a value structure (measurements are the same as the SfM input data, while camera poses and values are read from Values) More... | |
Detailed Description
Data structure for dealing with Structure from Motion data.
- Date
- January 2022
Definition in file SfmData.h.