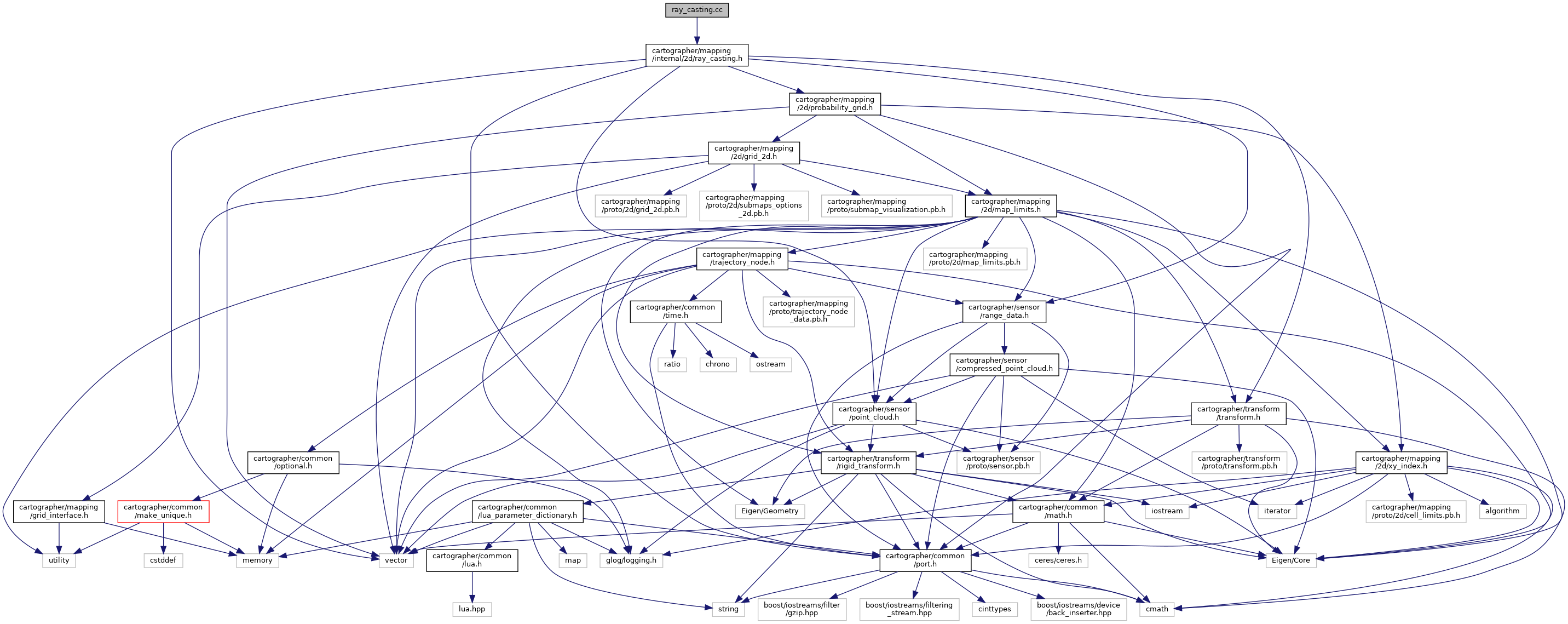
Include dependency graph for ray_casting.cc:
Go to the source code of this file.
Namespaces | |
| cartographer | |
| cartographer::mapping | |
Functions | |
| void | cartographer::mapping::CastRays (const sensor::RangeData &range_data, const std::vector< uint16 > &hit_table, const std::vector< uint16 > &miss_table, const bool insert_free_space, ProbabilityGrid *const probability_grid) |