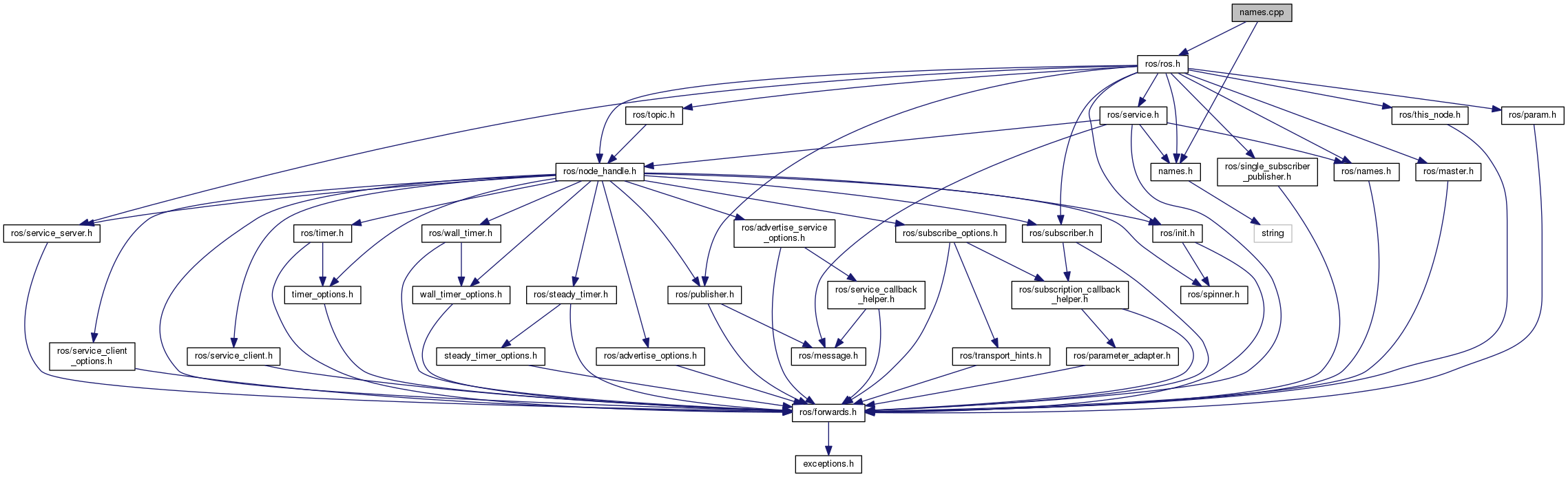
Include dependency graph for names.cpp:
Go to the source code of this file.
Namespaces | |
| visp_camera_calibration | |
Functions | |
| std::string | visp_camera_calibration::calibrate_service ("calibrate") |
| std::string | visp_camera_calibration::calibration_path_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/calibration_path") |
| std::string | visp_camera_calibration::camera_prefix ("/visp_camera_calibration") |
| std::string | visp_camera_calibration::gray_level_precision_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/gray_level_precision") |
| std::string | visp_camera_calibration::images_path_param ("/visp_camera_calibration/visp_camera_calibration_camera/images_path") |
| std::string | visp_camera_calibration::model_points_x_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/model_points_x") |
| std::string | visp_camera_calibration::model_points_y_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/model_points_y") |
| std::string | visp_camera_calibration::model_points_z_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/model_points_z") |
| std::string | visp_camera_calibration::pause_at_each_frame_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/pause_at_each_frame") |
| std::string | visp_camera_calibration::point_correspondence_topic ("point_correspondence") |
| std::string | visp_camera_calibration::raw_image_topic (camera_prefix+"/image_raw") |
| void | visp_camera_calibration::remap () |
| std::string | visp_camera_calibration::selected_points_x_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/selected_points_x") |
| std::string | visp_camera_calibration::selected_points_y_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/selected_points_y") |
| std::string | visp_camera_calibration::selected_points_z_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/selected_points_z") |
| std::string | visp_camera_calibration::set_camera_info_bis_service ("set_camera_info_bis") |
| std::string | visp_camera_calibration::set_camera_info_service (camera_prefix+"/set_camera_info") |
| std::string | visp_camera_calibration::size_precision_param ("/visp_camera_calibration/visp_camera_calibration_image_processing/size_precision") |