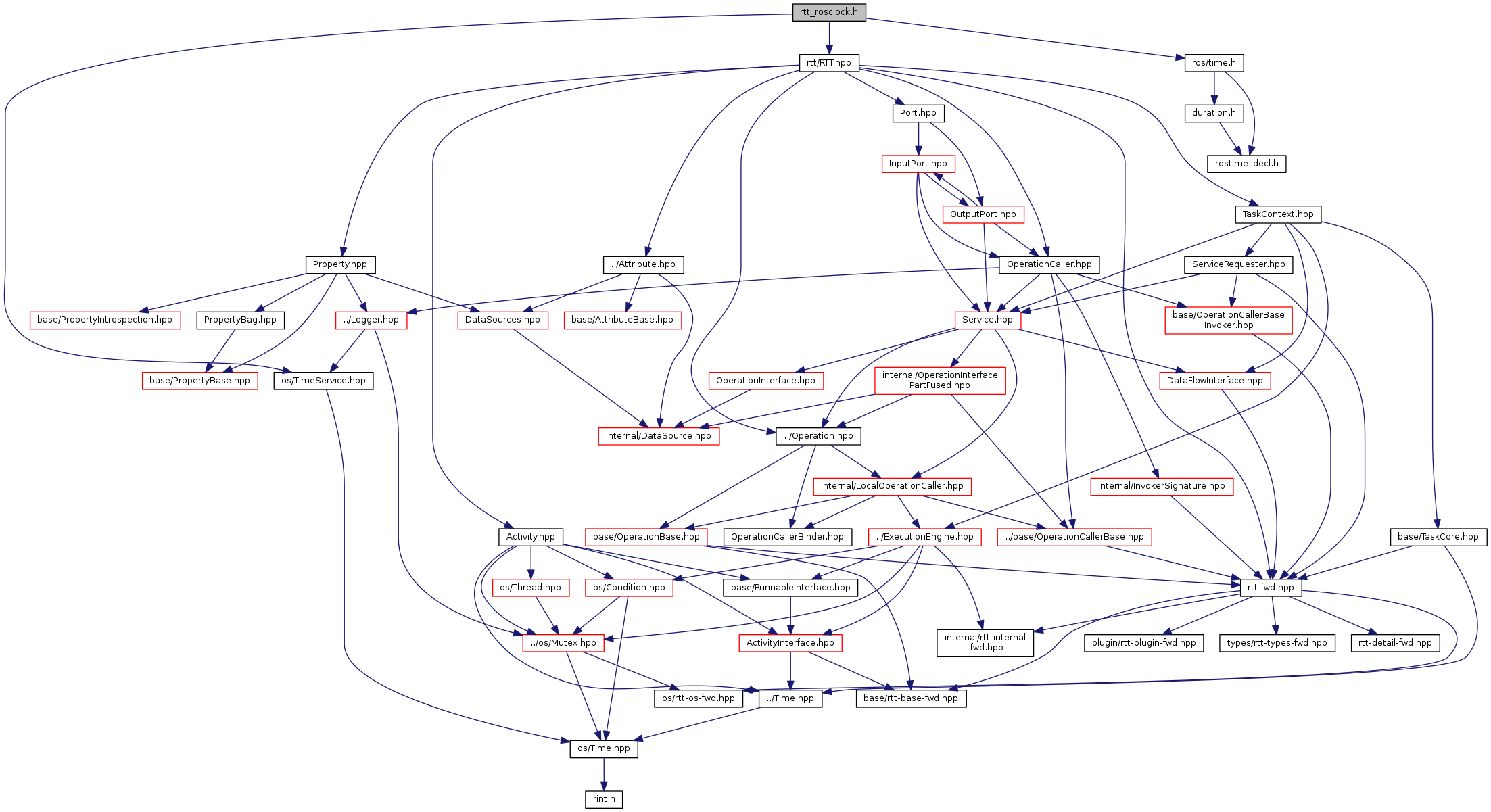
Include dependency graph for rtt_rosclock.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| rtt_rosclock | |
Functions | |
| const bool | rtt_rosclock::disable_sim () |
| Do't use a simulated clock source. More... | |
| const bool | rtt_rosclock::enable_sim () |
| Use a simulated clock source. More... | |
| const ros::Time | rtt_rosclock::host_now () |
| Get the current time according to CLOCK_HOST_REALTIME or the simulation time. More... | |
| const RTT::Seconds | rtt_rosclock::host_offset_from_rtt () |
| Get the difference in seconds between rtt_wall_now() and host_wall_now() More... | |
| const ros::Time | rtt_rosclock::host_wall_now () |
| Get the current time according to CLOCK_HOST_REALTIME or the wall time. More... | |
| const ros::Time | rtt_rosclock::rtt_now () |
| Get the current time according to RTT. More... | |
| const ros::Time | rtt_rosclock::rtt_wall_now () |
| Get the current wall time according to RTT. More... | |
| const bool | rtt_rosclock::set_sim_clock_activity (RTT::TaskContext *t) |
| Set a TaskContext to use a periodic simulation clock activity. More... | |
| void | rtt_rosclock::update_sim_clock (const ros::Time new_time) |
| Update the current simulation time and trigger all simulated TaskContexts. More... | |
| void | rtt_rosclock::use_manual_clock () |
| Use manual clock updates. More... | |
| void | rtt_rosclock::use_ros_clock_topic () |
| Use ROS /clock topic for time measurement. More... | |