Public Member Functions | |
| def | __init__ (self, args, kwargs) |
 Public Member Functions inherited from flexbe_core.core.monitoring_state.MonitoringState Public Member Functions inherited from flexbe_core.core.monitoring_state.MonitoringState | |
| def | __init__ (self, args, kwargs) |
| def | force_monitoring (self) |
| def | monitor (self, key, outcome=None) |
Public Attributes | |
| execute | |
| Public Attributes inherited from flexbe_core.core.monitoring_state.MonitoringState | |
| execute | |
| name | |
Private Member Functions | |
| def | _disable_ros_control (self) |
| def | _enable_ros_control (self) |
| def | _manually_transitionable_execute (self, args, kwargs) |
Private Attributes | |
| __execute | |
| _feedback_topic | |
| _force_transition | |
| _pub | |
| _sub | |
| _transition_topic | |
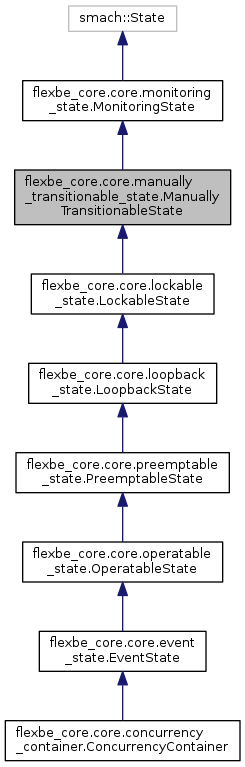
Detailed Description
A state for that a desired outcome can be declared. If any outcome is declared, this outcome is forced.
Definition at line 10 of file manually_transitionable_state.py.
Constructor & Destructor Documentation
| def flexbe_core.core.manually_transitionable_state.ManuallyTransitionableState.__init__ | ( | self, | |
| args, | |||
| kwargs | |||
| ) |
Definition at line 16 of file manually_transitionable_state.py.
Member Function Documentation
|
private |
Definition at line 54 of file manually_transitionable_state.py.
|
private |
Definition at line 48 of file manually_transitionable_state.py.
|
private |
Definition at line 31 of file manually_transitionable_state.py.
Member Data Documentation
|
private |
Definition at line 21 of file manually_transitionable_state.py.
|
private |
Definition at line 24 of file manually_transitionable_state.py.
|
private |
Definition at line 19 of file manually_transitionable_state.py.
|
private |
Definition at line 27 of file manually_transitionable_state.py.
|
private |
Definition at line 28 of file manually_transitionable_state.py.
|
private |
Definition at line 25 of file manually_transitionable_state.py.
| flexbe_core.core.manually_transitionable_state.ManuallyTransitionableState.execute |
Definition at line 22 of file manually_transitionable_state.py.
The documentation for this class was generated from the following file: