#include "dynamic_robot_state_publisher/joint_state_listener.h"#include <kdl_parser/kdl_parser.hpp>
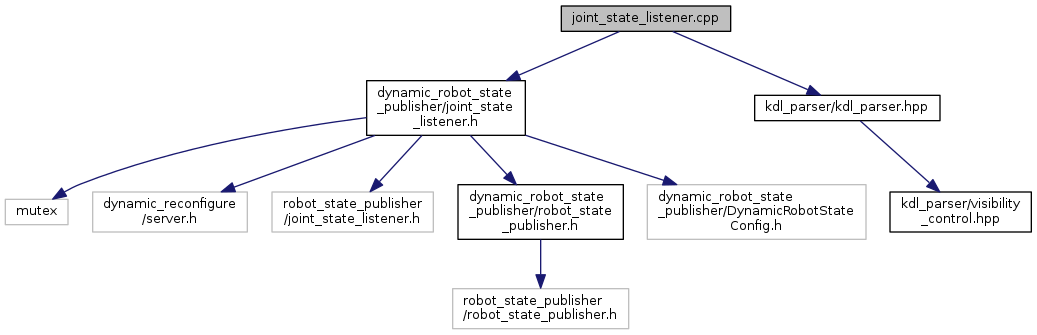
Include dependency graph for joint_state_listener.cpp:
#include "dynamic_robot_state_publisher/joint_state_listener.h"#include <kdl_parser/kdl_parser.hpp>