Include dependency graph for chomp_utils.h:

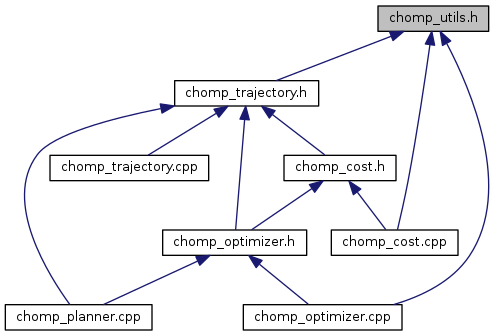
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| chomp | |
Functions | |
| static void | chomp::jointStateToArray (const moveit::core::RobotModelConstPtr &kmodel, const sensor_msgs::JointState &joint_state, const std::string &planning_group_name, Eigen::MatrixXd::RowXpr joint_array) |
| static double | chomp::normalizeAngle (double angle) |
| static double | chomp::normalizeAnglePositive (double angle) |
| static double | chomp::shortestAngularDistance (double start, double end) |
Variables | |
| static const int | chomp::DIFF_RULE_LENGTH = 7 |
| static const double | chomp::DIFF_RULES [3][DIFF_RULE_LENGTH] |